

注目のHappymodel の軽量3インチ機 Crux3のレビューパート2。 前回は機体をじっくりと見ていきました。今回はフライトコントローラーの設定内容を確認していきましょう。
レビューのパート1 UNBOX編はこちら。

HappyModel Crux3 はBanggoodで購入できます。

Happymodel Crux3 は Betaflight 3.5.7
Betaflightのバージョンは 3.0系統の最終バージョンである 3.5.7 がインストールされていました。
先にレビューした、Eachine AE65 のCrazybeex と同じですね。
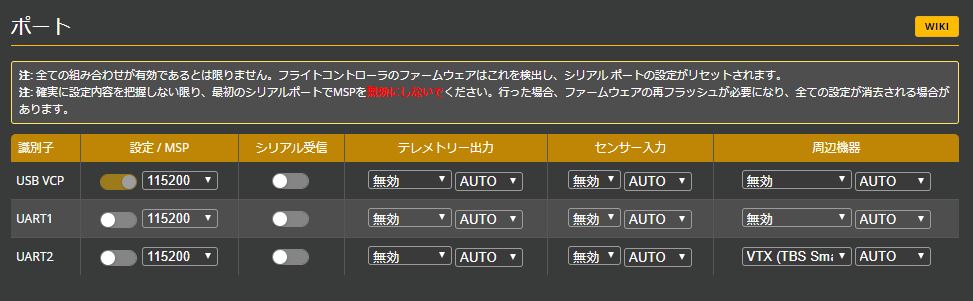
「ポート」タブです。内蔵レシーバですので、UARTは使用しません。VTXのコントロール用にUART2にSmartAudio が割り当ててあります。
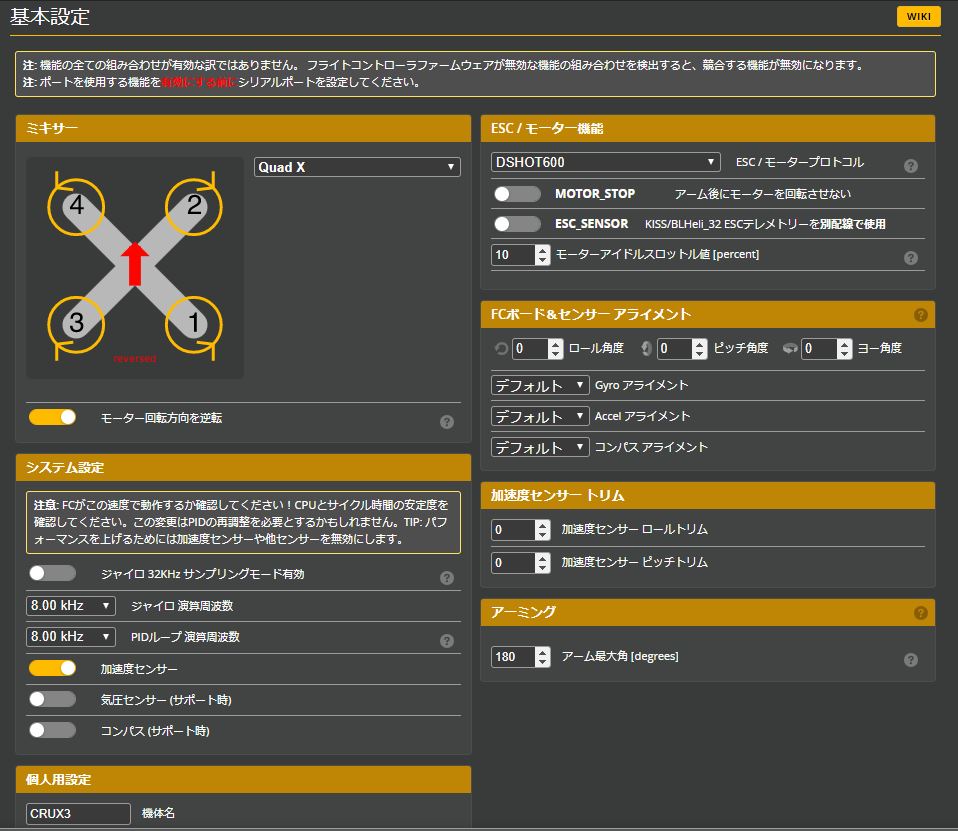
「基本設定」タブ。
モーターアイドルスロットル値に10%が設定してあります。(Betaflightデフォルトは5.5%)
モーター回転方向は逆回転(プロップアウト)になってます。アーミング角度も180度なのでひっくり返ってしまった時に「クラッシュアフターフリップ」で起き上がれます。
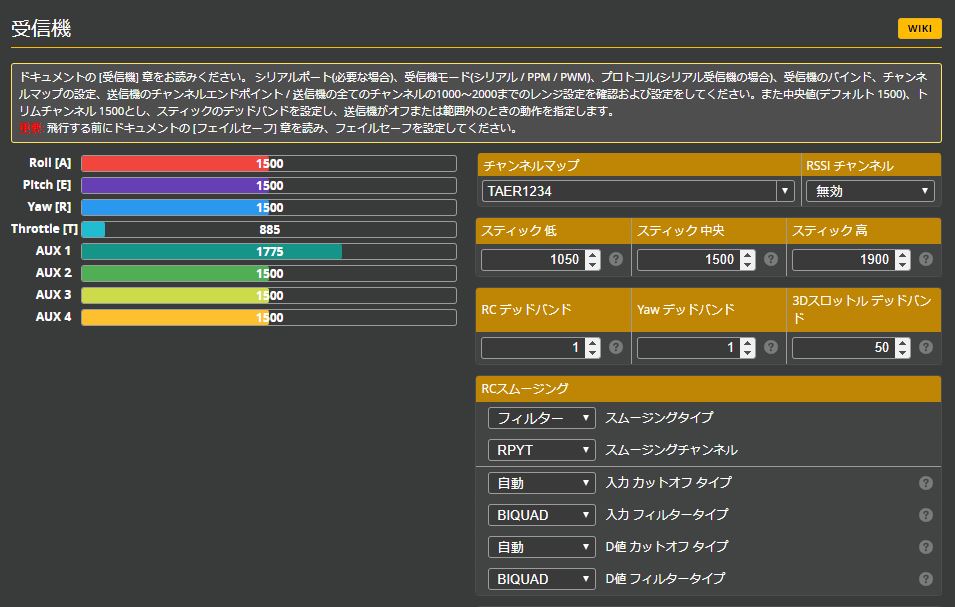
今回レシーバーをFrSkyバージョンにしたので、受信機の所はFRSKY_Dになっています。
FrSky の D16モードは FRSKY_X で、D8モードはFRSKY_Dになります。

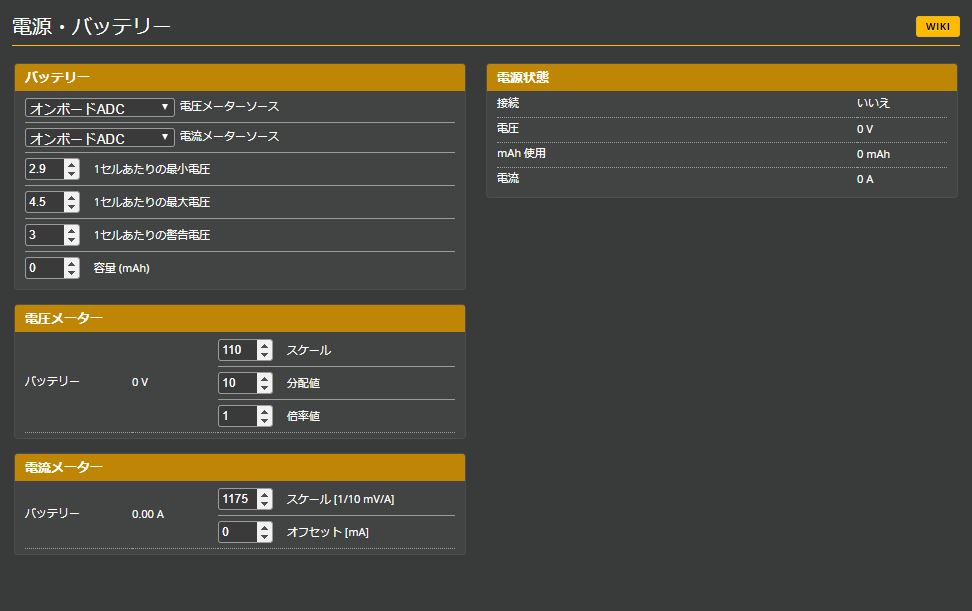
「電源・バッテリー」タブ。1セル当たりの最大電圧が4.5Vに設定してありますね。HV(ハイボルテージ)タイプのバッテリーに対応するためです。
私は屋外で飛行するので、最小電圧と警告電圧はそれぞれ0.2V上げて設定しました。あまりギリギリな設定だと警告が表示されてから戻ってこれない時があるので少し余裕を持たせました。
「受信機」内蔵レシーバーの場合はRSSIチャンネルを設定しなくてもOSDに表示できます。
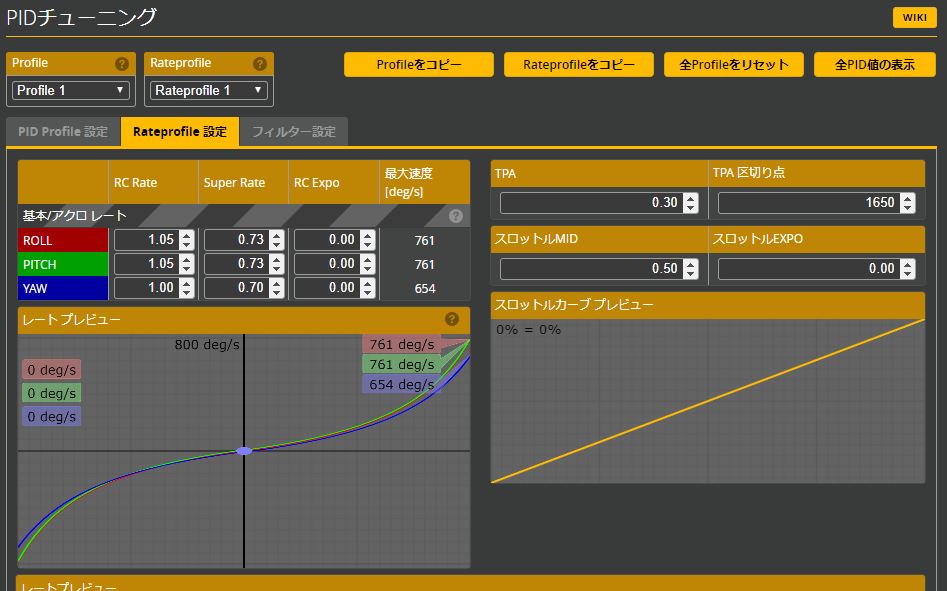
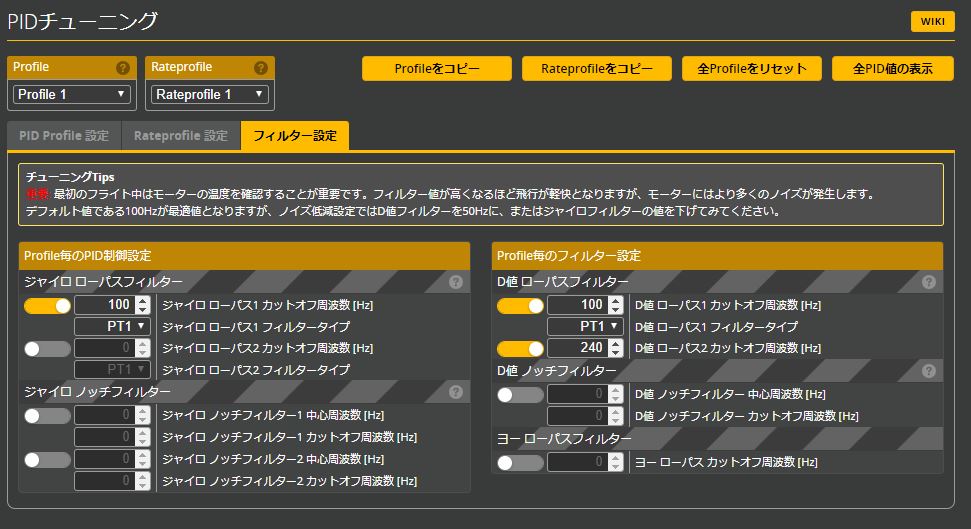
「PIDチューニング」タブ。特に何も変更せずに初フライトしてみます。

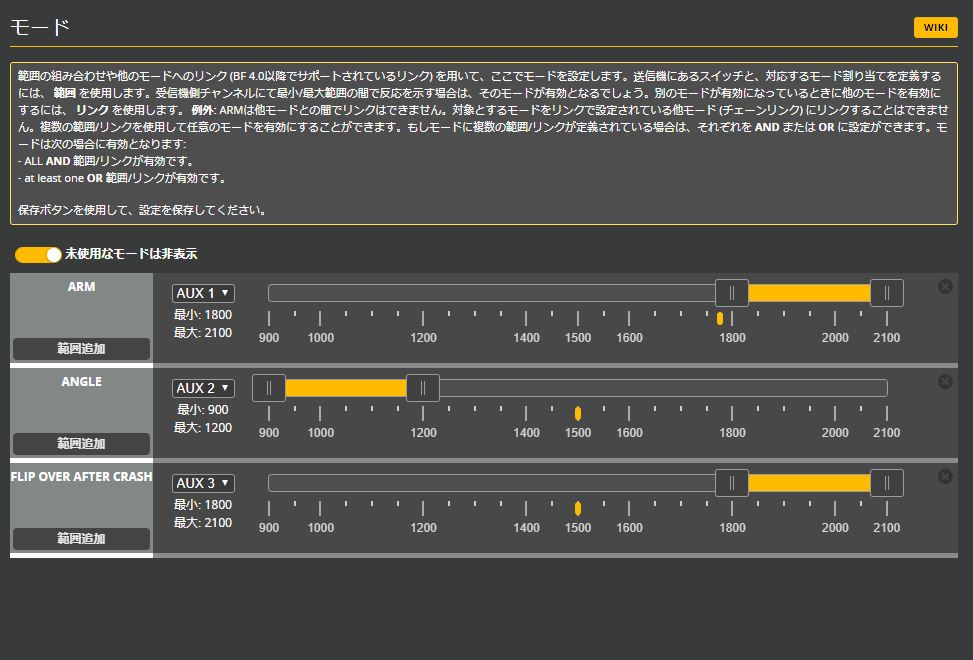
「モード」タブは自分の設定に変更します。
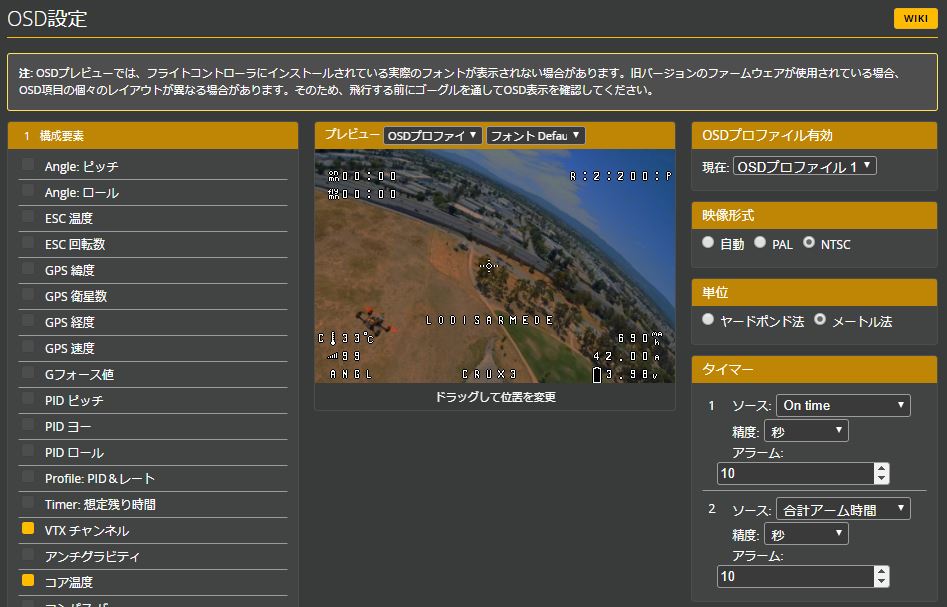
「OSD設定」ここも普段使用しているレイアウトに変更しました。なおOSDフォントはボールドが設定してありました。
ESCの設定
ESCのファームウェアはBLHeli_S 16.8でした。という事は JazzMaverick氏のBLHeli_Mですね。
このバージョンは推薦されないので後ほど変更しましょう。
ファームウェアのターゲット名は、S-H-50です。
(下図で96KHzが表示されているのは設定を読み込んだ直後の値なので、実際に96KHzが設定されているわけではありません。)

BLHeli_Mへの変更は以下の記事で詳しく解説しています。

デフォルトの設定ファイル
デフォルト設定のダンプファイルは以下からダウンロードできます。
まとめ
送信機とのバインドするときに、FrSkyバージョンのレシーバーを、CLIからコマンドでバインドモードに入れるには、説明書に書いてある方法ではなく、Betaflight 3.5.7 では下記のように入力するとバインドモードになります。
FRSKY_BIND
じつはこの設定を確認後に室内でホバリングテストをしようとしたら、いきなり部屋の天上にぶつけましたw モーターアイドルスロットル値が10%と高く設定してありましたので、一気に浮き上がってしまいました。なんでこんな高い数字に設定してあるんだろうと思ったら、これはInsta360 GOを搭載することを前提の設定なんですね。Insta360 GOの分重くなるのでそれに合わせてあるようです。
とりあえず10%から5.5%まで戻して飛ばしてみます。

