

LDARC(旧KingKongブランド)から出た85mmWhoop、ET85が届きましたのでレビューしていきたいと思います。以前は Tiny GTシリーズが好評でしたが今回はブラシレス機として登場です。今回はFCの設定内容等見ていきましょう。
なお今回はBanggood様よりレビュー機としてご提供いただきました。この場をお借りして御礼申し上げます。
デフォルト設定確認
まずは Betaflight のバージョンを確認します。

Betaflight 4.0.2 がインストール済みですね。ファームウェアターゲットは MATEKF411。
では Betaflight の設定内容を見ていきましょう。ポートタブから。
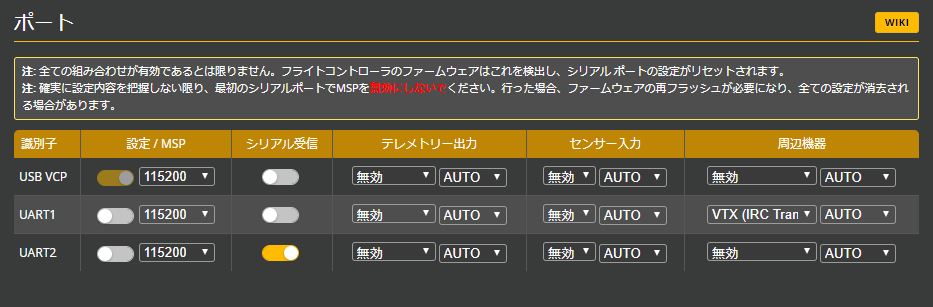
UART1 がVTXの設定変更用に、IRC Tramp プロトコルが割り当ててあります。UART2 はシリアルレシーバーで使用中です。ですので空きのポートはありません。ちなみに UART2 はSBUS用の反転ポートと反転していないポート用のパッドが用意されています。反転ポートは基板上の印刷では、nT2 とか nR2 のように小文字の n がついていることが多いです。これまめねw
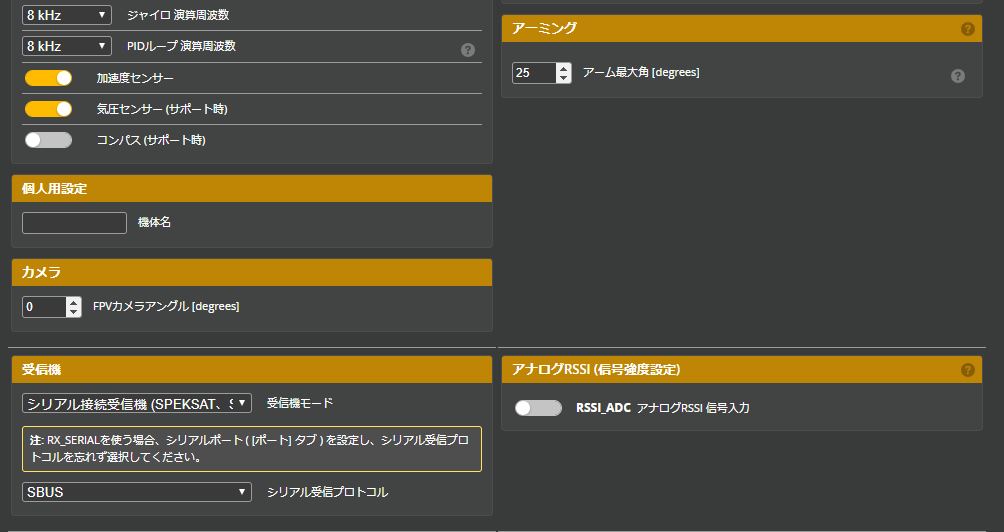
続いて基本設定を見てみましょう。モーター逆転(プロップアウト)仕様になっています。ジャイロの向きが180度反対側ですね。
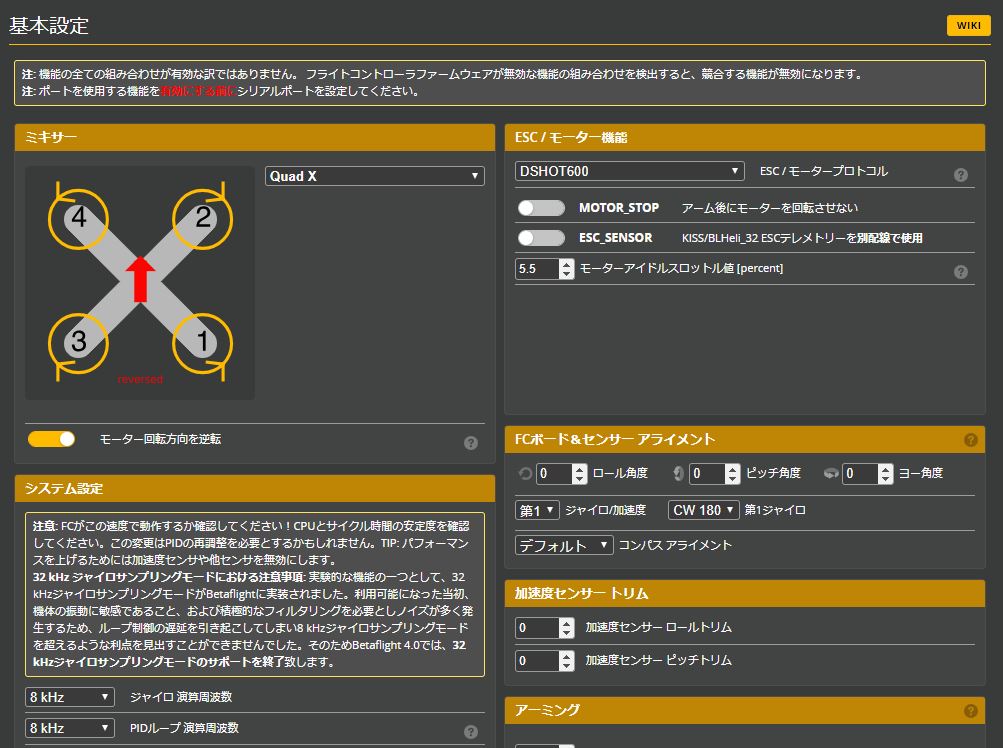
その他は Betaflight のデフォルトの様です。アーミング角度は Flip over after crash 用に180度に設定しましょう。
設定を見ているだけで CPU使用率が41%です。STM32F411 は 100MHz駆動で F405の168MHzより格下なんですねえ。ループタイムを 4K/4K に落とせば問題ないでしょう。

電源・バッテリータブ。電流メーターのスケールのみ 210 に変更してあります。これで正確な電流値・消費量が分かるわけですね。HVタイプのバッテリーを使用する予定なら「1セル当たりの最大電圧」を4.4位にしておくといいでしょう。

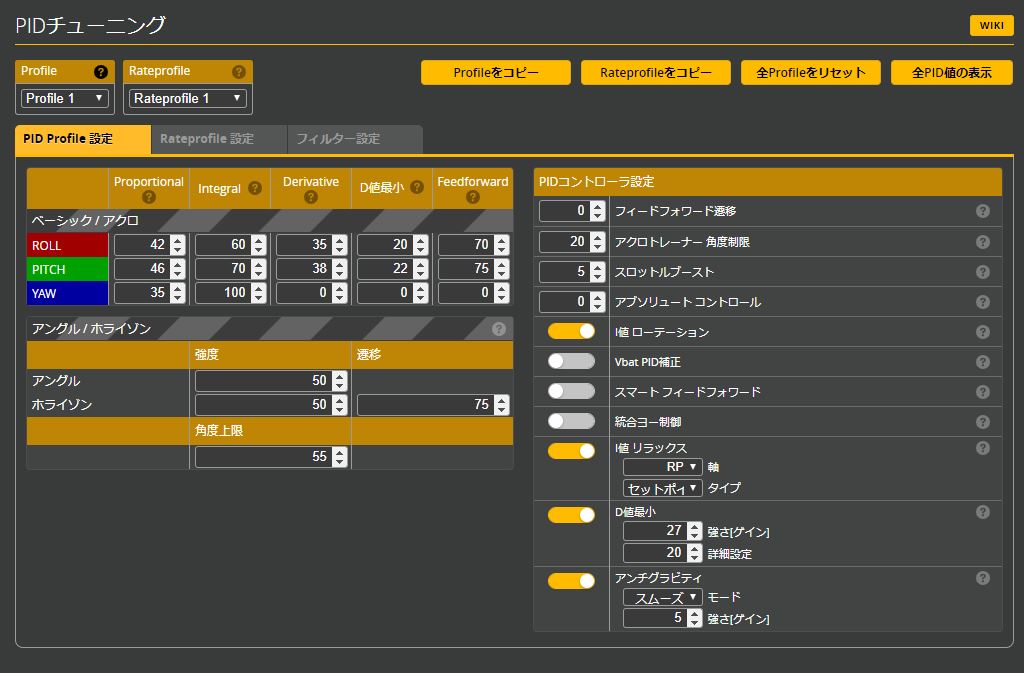
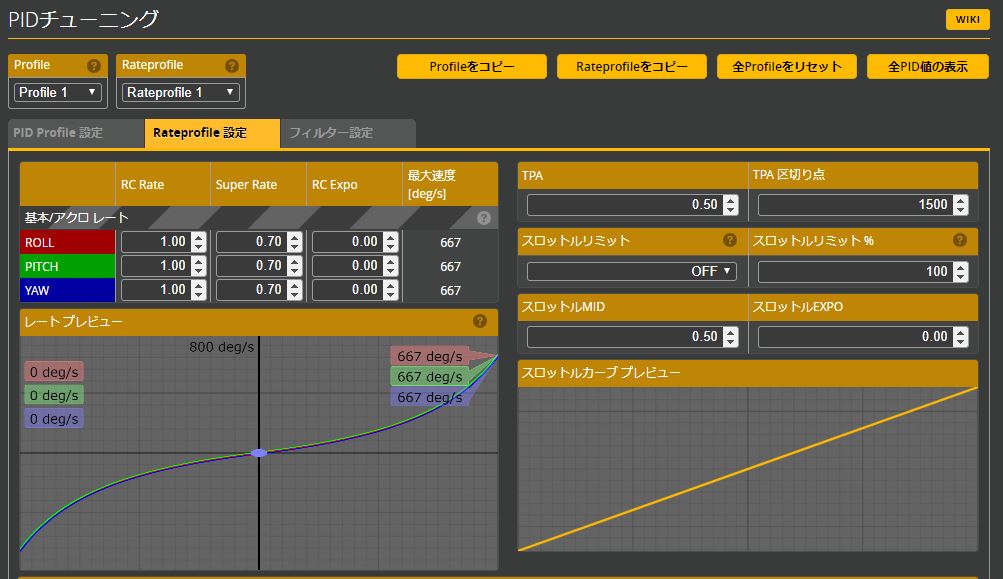
PID・フィルターはデフォルトですが、Betaflight 4.1 に上げてから設定したほうがいいですね。

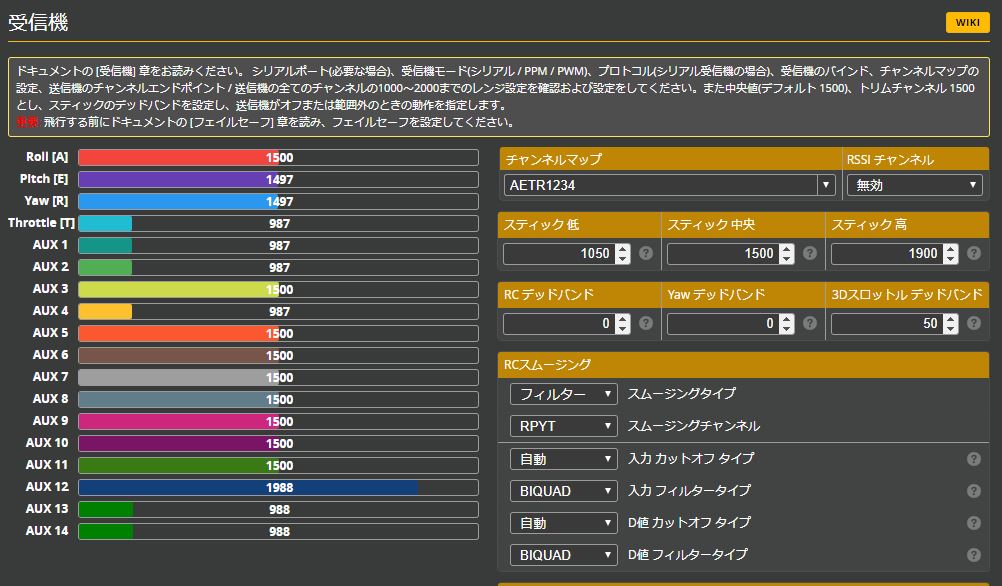
受信機タブです。16chにRSSIが入ってきてるようです。ロール、ピッチ、ヨー、スロットルで4ch使用しているので 16chは AUX12 になりますから、「RSSIチャンネル」にAUX12を設定します。
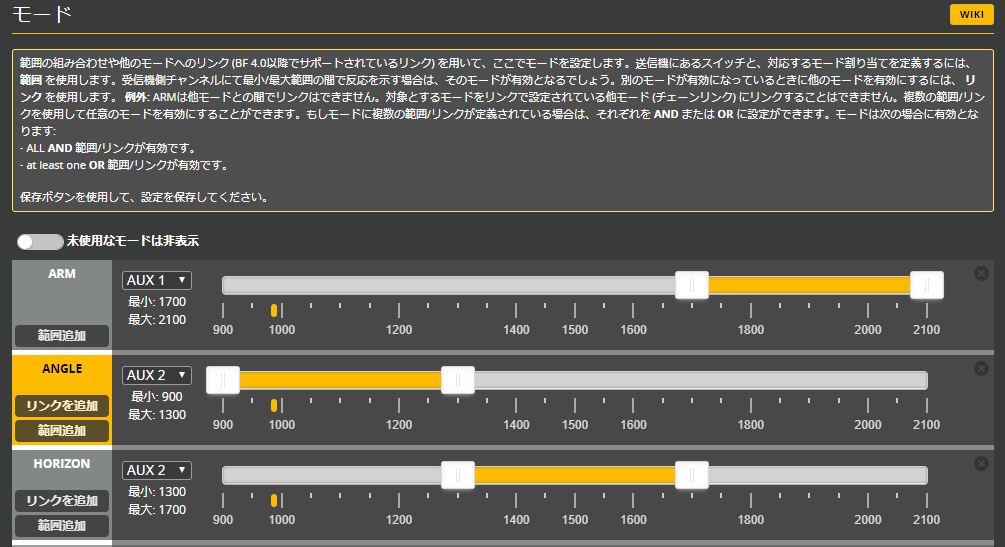
モードタブは下記の画像のように少しだけ設定してありました。

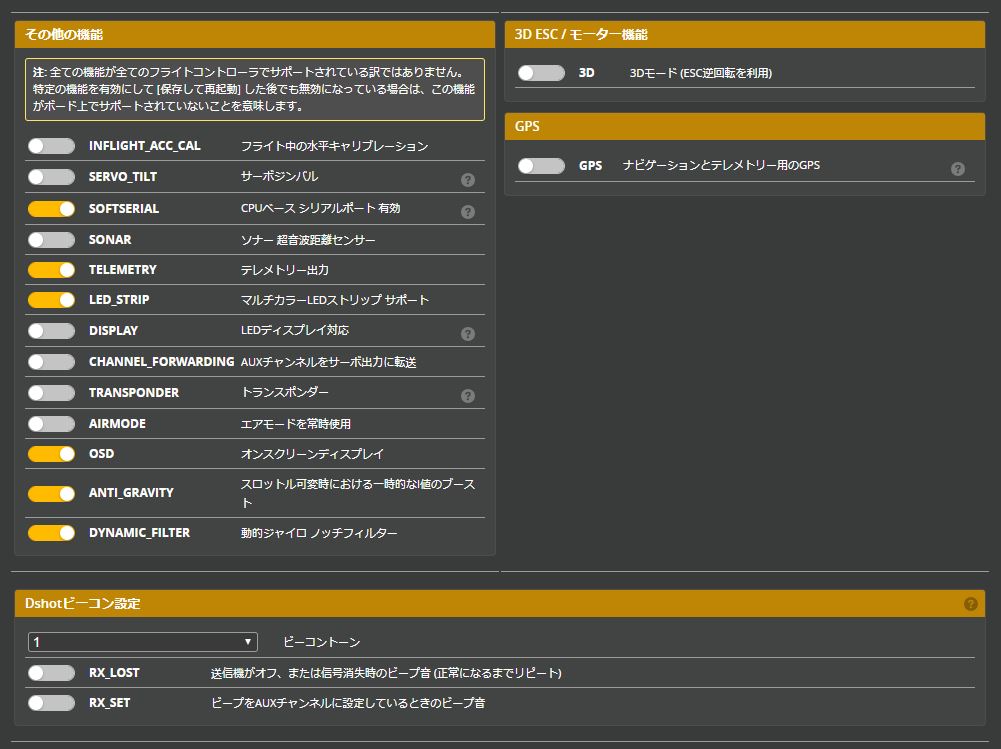
LEDストリップ。最近の Betaflight のデフォルトはなぜかこの4個のLEDが設定してあります。このFCボードにはLEDストリップのパッドがありますので好みのLEDを使用可能です。(製品には付属していません。)

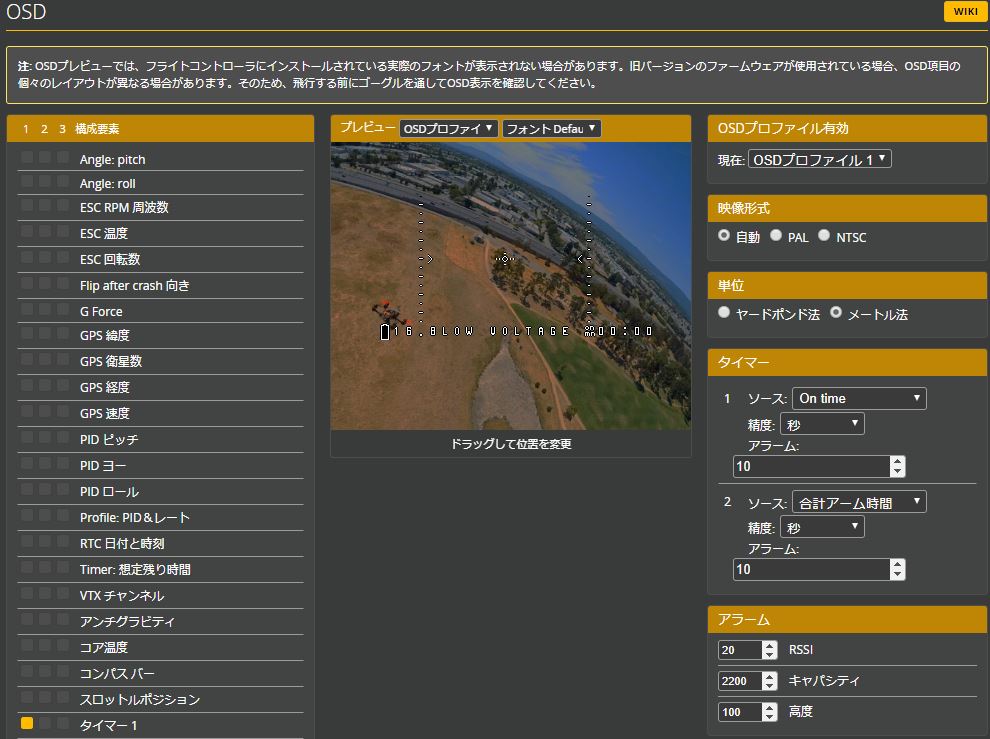
OSDはほんの少し設定してあります。ここもお好みの設定にしましょう。
スクリーンショットを撮り忘れたのですが、フェイルセーフのステージ2への移行までの時間が30(3秒)になっていました。さすがに3秒は長すぎるので1秒に設定します。
Betaflight の初期設定でDIFF_ALLしたものです。テキストファイル
Betaflight 4.1.0 へアップデート
最新の Betaflight 4.1.0 はいろいろ進化していますのでアップデートしましょう。4.0.2 は「月まで飛んでいく」問題もありますし…
Betaflight Configurator 10.6.0 でターゲットである、MATEKF411を探します。Legacyターゲットではなく統合ターゲットMATEKF411(MTKS)を選択します。なおカッコ内のMTKSはメーカーの略号です。
ファームウェアアップデート後はカスタム設定を適用させます。詳しくは当ブログの 「Betaflight 4.1.0 を使用してみる その1」を参照してください。

Betaflight 4.1 にはそれ以前のバージョンのPIDやフィルター設定をCLIから貼り付けないで下さい。それ以外のポートやモード、OSD設定はCLIから貼り付け可能です。

ジャイロとPIDのループタイムを 8K/8K から 4K/4K に変更しました。CPU使用率が 41% から 13% になりました。
PIDやフィルターはデフォルトのままで使用してみます。
VTXテーブルをファイルから読み込みます。日本向けのJBANDです。詳しくは当ブログ記事の「Betaflight 4.1.0 を使用してみる その2」を参照してください。ファイルもダウンロードできます。
さてこれでいよいよ次はフライトです。

