

FC設定の確認
ファームウェアは Betaflight 4.1 がインストールされていました。
ターゲット名は、MATEKF411RX
デフォルトの diff all は下記からダウンロードできます。
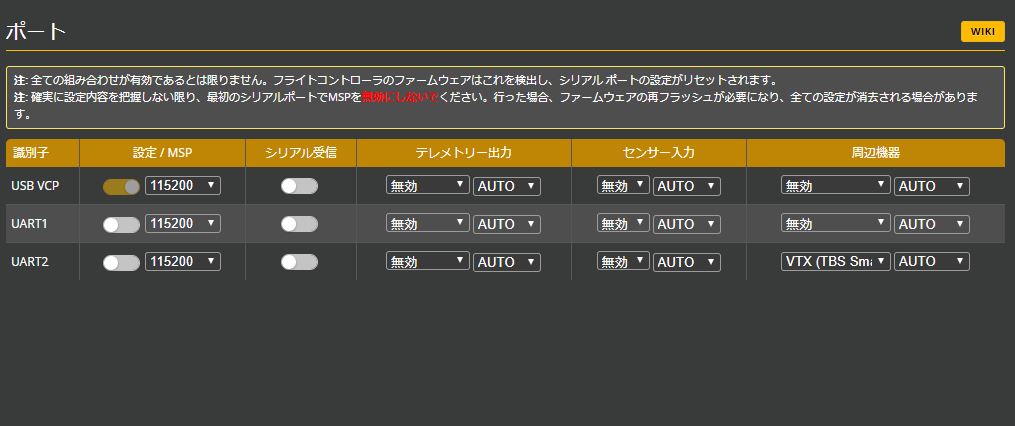
ポートタブはこんな感じ。UART2 に VTXのコントロール用に使用しています。
外部のレシーバーを使用する時は UART1 を使用します。
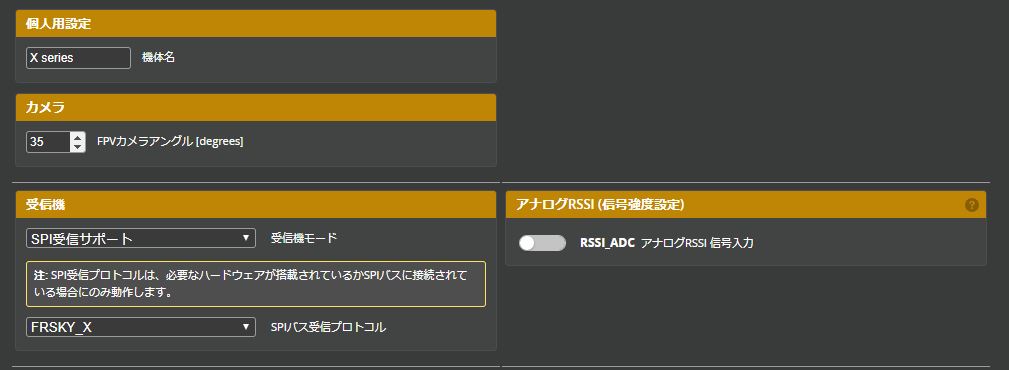
基本設定タブは、
- モーター回転方向が逆向き
- DSHOT300
- 双方向DSHOTがON
- モーター極数が12
- ジャイロが180回転
- PIDループが4K
- 受信機が SPI受信機サポートとFRSKY_X(Frskyモデルの場合)
これらの設定を注意すればよさそうです。
あと、この設定はRPMフィルターを使用する設定ですね。

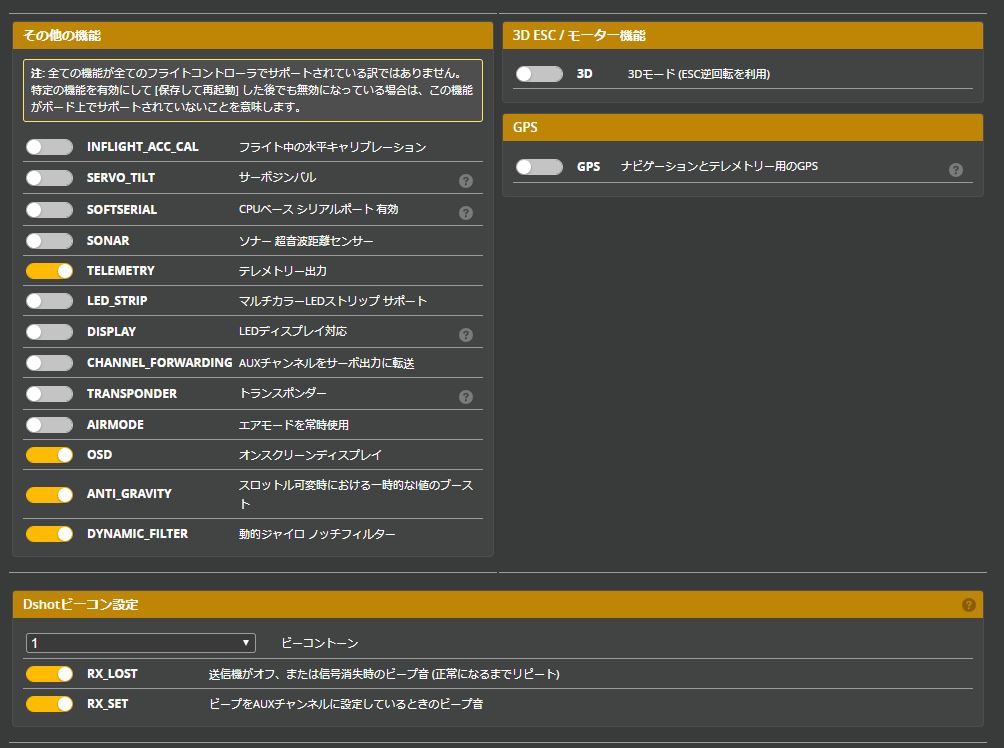
この機種搭載のDVRボードには、OSDメニューを見ながら送信機のジョイスティックで変更できるように、すでにFCとの配線が済んでいました。FCからのDVRボードをコントロールするためのポートを、ソフトシリアルポートで行うため、上の図の「その他の機能」で SOFTSERIAL を有効にする必要があります。(配線も設定も済んでいるのにココだけ有効になっていませんでした。)
ソフトシリアルは、FC の LED パッドを使用するように CLIでリソースの変更と設定が必要です。(下記コマンドを入力)
# リソースの書き換え
resource LED_STRIP 1 NONE
resource SERIAL_TX 11 B03
resource CAMERA_CONTROL 1 A00
# カメラをコントロールするための設定
set camera_control_key_delay = 200
set camera_control_internal_resistance = 99
set camera_control_button_resistance = 125,110,90,75,20
# 変更を保存して再起動
saveなお、購入時にこれらの設定は済んでいました。
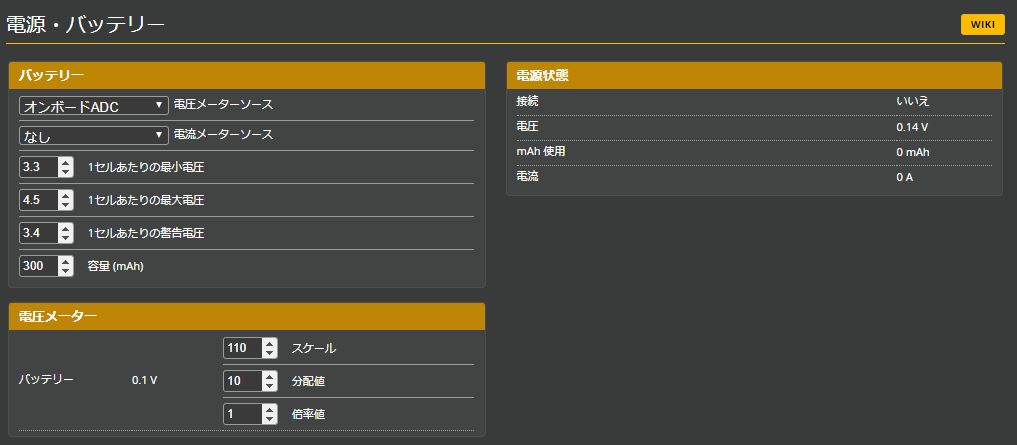
電源タブ。電流計は無しの設定。
PID設定はスライダーが無効になっているので独自の設定がしてあることになります。
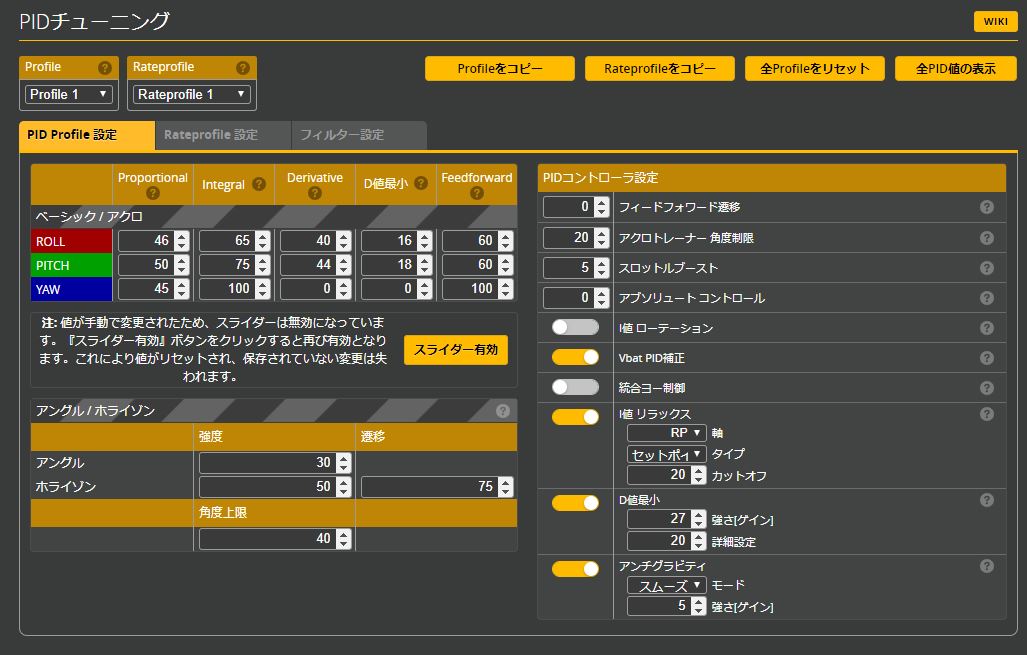
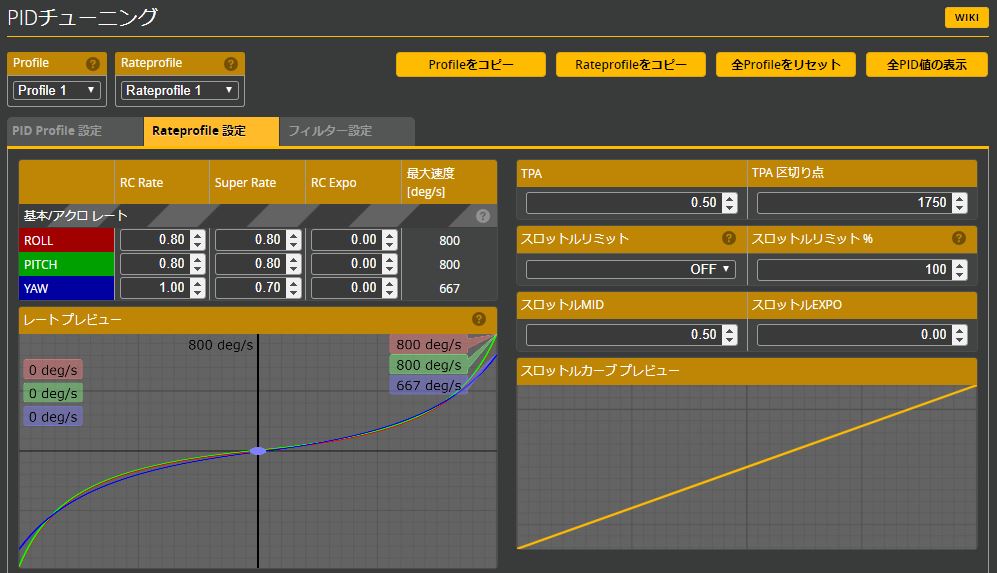
レートも微妙な設定がしてあります。ここは好みで設定していいでしょう。
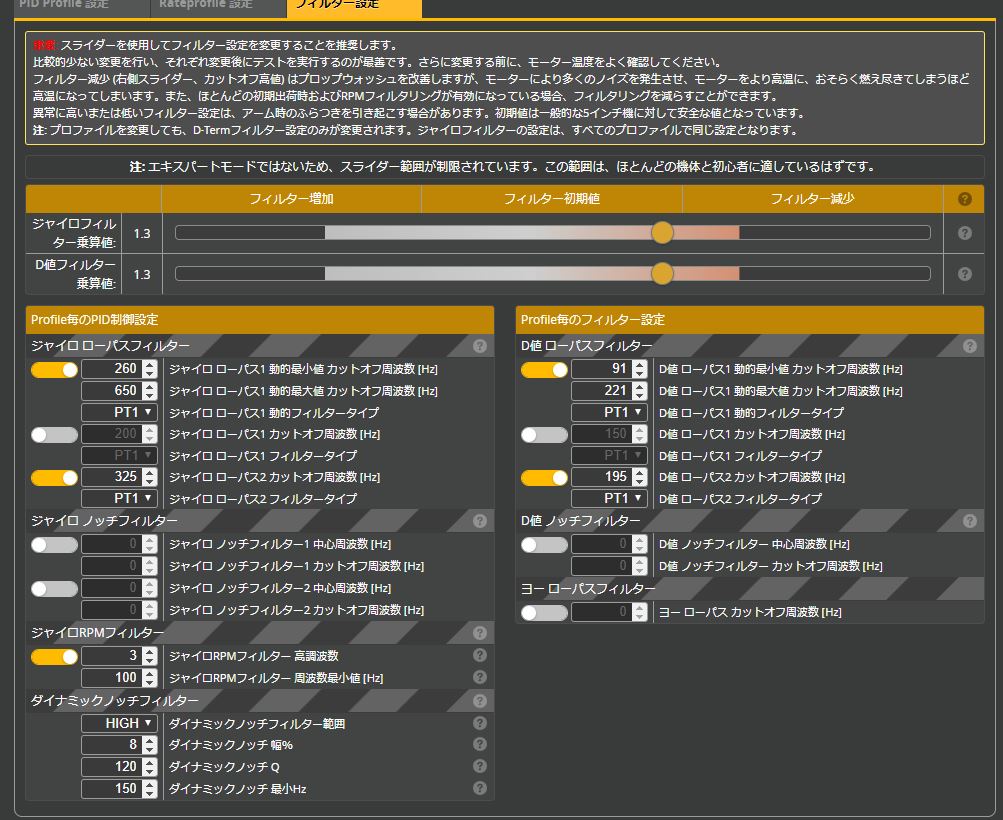
フィルターは、RPMフィルターでモーター由来のノイズがジャイロに入って来ないので、レスポンスを上げるために調整スライダーがフィルター減少方向へ振ってあります。
モードタブ、いつも使用する設定に変更しましょう。

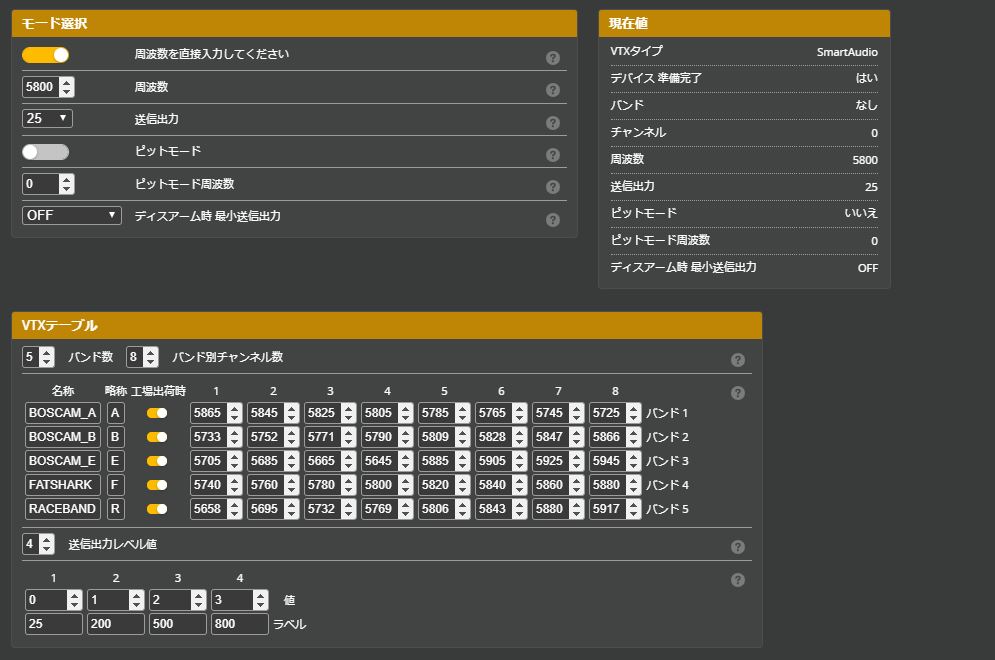
VTXタブ、VTXテーブルが設定してあります。ただし、搭載しているVTXは25mwまでの出力しかありませんから、送信出力を変更しても変わりません。実際に変更しても出力は変わりませんでした(笑)
ESC設定の確認
BLHeli Configureatr で確認してみました。

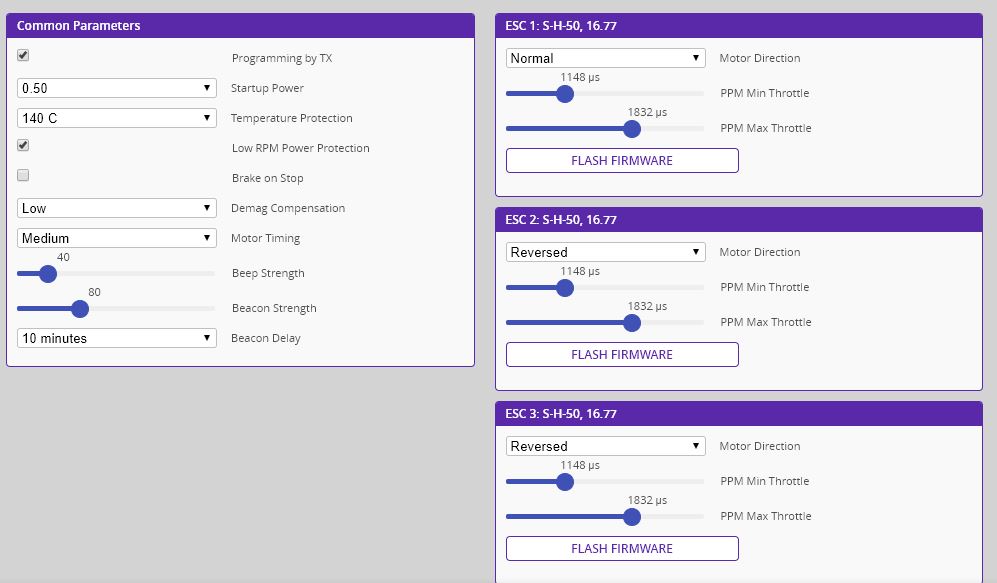
ESCのターゲット名が、S-H-50
バージョンが 16.77 と出ているので、JazzMaverick 氏 作成のDSHOTテレメトリー対応のファームウェアですね。このファームウェアについては以下の記事で読めます。

FC側の設定でRPMフィルターが使用できるようになっており、ESCも対応ファームウェアに書き換えられていますので、ちゃんとRPMフィルターが使用できるようになっています。
まとめ
初めからRPMフィルターが設定してあったり、少し特殊なリソース書き換えでソフトシリアルを使用してカメラコントロールできるようにしたあったりして、ちょっと野心的な感じです。バッテリー込みで46.5gの機体がどのように飛んでどのような映像を見せてくれるのか期待感をそそりますね。
次回フライトテスト編につづく


