
RunCam Hybrid が到着したのを機に手持ちのパーツで新しい3インチ機を組みました。さらにカメラ切り替えボードがあったので、後部にもFPVカメラを搭載してみました。もちろん後ろ向きにです。これで飛行途中にFPVカメラを切り替えて後ろ向きに飛行することができます。
使用したパーツ
フレーム
使用したフレームは FLYWOO ANT です。当ブログで記事にしました。

3インチ用フレームで、20mmX20mmマウントホールが2か所あるので、FCとスプリットタイプのDVRボードを前後に並べて搭載できる物です。
なお今回は RunCam Hybrid のカメラ部の高さがありそのままではカメラをチルト出来ないので、トッププレートの高さを5mm高くしました。具体的には前部の25mmのスタンドオフを30mmの長さの物に交換し、後部は5mmのナイロンスタンドオフを追加して底上げしました。また5mm高くなったのでカメラを固定するサイドプレートが届かなくなりましたので、以前5インチ機で使用していたサイドプレートをあてがってみたらサイズがちょうどよく、これを使用することにしました。
FCスタック
FCとESCそしてVTXは20mmX20mmマウントタイプの LDARC 20x20mm KK Flytower です。
FC は F4、ESC は 20A で BLHeli_S。またVTXは25/100/200mW で IRC Trampで制御できます。ブラックボックス用のフラッシュは搭載してません。

モーター
モーターは、FLYWOO NIN TINY 1404 3750KV です。3S~4S対応で静かで放熱がいいようです。たぶんモーター自体のバランスもいいのではないかと思います。全然熱くなりません。まるでRPMフィルターを使用しているような感じです。

カメラ
もちろん RunCam Hybrid です。レビュー記事あります。

レシーバー
FrSky の XM+レシーバーを使用しました。
ブザー
ブザーはファインダータイプの物を使用してみました。クラッシュしてバッテリーも外れて電源が落ちちゃった場合、通常のブザーでは電源が無いのですから当然鳴らすことができません。ファインダータイプのブザーは(というかファインダーですね。)それ自体が小さなバッテリーを持っているので単体でブザーが鳴ります。今回使用したのはこちらの物。

JHEMCU JHE20B Finder BB Ring 100dB Buzzer Alarm with LED Light というもので、非常に軽いです。
FCとの接続は通常のパッシブブザーと同じで、5V、G、B- の3本を接続します。また通常のブザーと同じようにスイッチで鳴らすことも出来ます。
メインバッテリーの接続が切れると30秒間は赤色のLEDが点滅します。キャンセルするなら今のうちだよ~と教えてくれている時間になります。この間にプッシュボタンを2秒以上押し続けるとキャンセルできます。
30秒を経過すると「ここだよ~モード」になり、最初の40秒間は低いボリュームでブザーが鳴ります。40秒経過後2時間までは最大ボリュームで4秒間隔でピッと鳴ります。2時間経過後バッテリーが無くなるまでは10秒ごとにピッと鳴ります。同時に高光度の白色LEDがフラッシュします。
スペック表によるとブザーの音量は105dBで、最大30時間作動するようです。LEDはかなり明るいのでいっそのこと夜に探したほうが見つけやすそうですw
カメラ切り替えボード
2つのFPVカメラからの入力をどちらか1つだけFCのビデオ入力へ送ります。
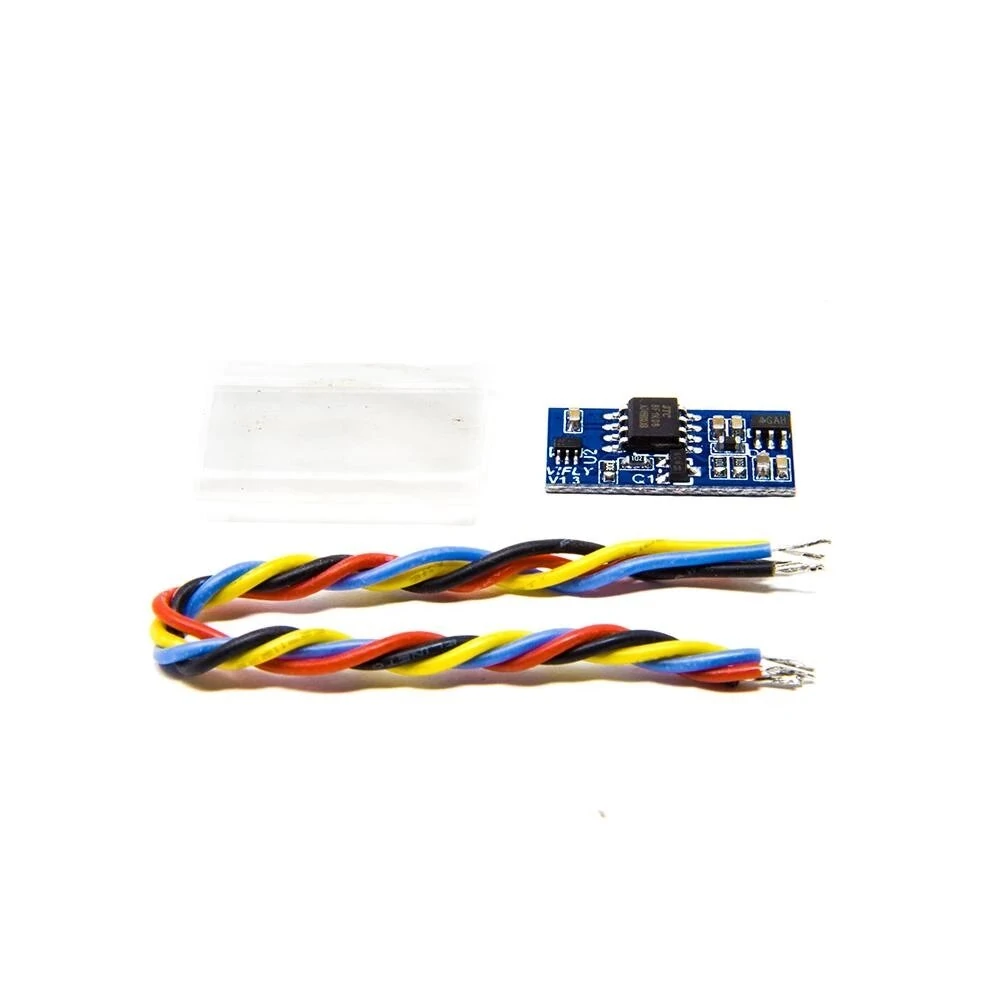
VIFLY 4.2 – 25V Dual FPV Camera Switcher Module という製品で縦横 9mmX18mmで重さ0.5gです。
前後2つのカメラからのビデオ入力とカメラへ送る電源が2か所づつあります。またFCへ送るビデオ出力があります。
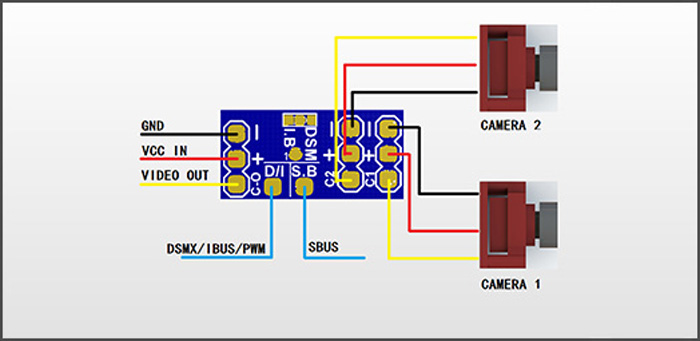
今回は前部カメラになる RunCam Hybrid との接続はビデオ信号のみにしました。なぜなら後部カメラに切り替わった時に電源の供給が止まり録画が止まると困るからです。(切り替わり毎に電源もON/OFFするのか未確認です。)
カメラの切り替えはSBUSの信号を直接ボードが読み込みんで切り替わります。今回使用するレシーバーの FrSky XM+ の SBUSパッドと、このカメラ切り替えボードの SBUSパッドを接続します。SBUS の ch7 が1700以上になると切り替わります。
後部カメラ
手元にあった使っていなかったもので RunCam Micro Swift 2 を使用してみました。

VTXアンテナ
これも予備として購入してあった Foxeer 5.8G Lollipop 3 を使用しました。ケーブルが長すぎますが重さ2.6gです。

プロペラ
Gemfan の 3035 3枚羽根です。

バッテリーストラップ
iFlight の 10X130mm の物です。このサイズは非常によく使います。10個入りで売っています。

完成機体
そして完成した機体がこちら。

上の写真では左側が前部で RunCam Hybrid 、トッププレートの一番後部にファインダーブザーが見えます。キャンセルボタンを押す必要があるのでアクセスしやすい所にある方が良いです。

前から見たところですね。水色のスタンドオフを5mm長めの物に交換しました。

右後方からの眺めです。後部カメラの RunCam Micro Swift 2 が見えます。
このカメラはほぼ水平に向いています。チルト角0度です。なぜなら、後部カメラを使用している時は機体を後方へ飛行(後部カメラ画像では前進)している時ですから、全部のメインカメラの RunCam Hybrid が上を向きすぎてしまうことがあるからです。ですので出来るだけピッチを下げない(スピードを出さない)ためにあえて後部カメラを水平にしました。
設定
Betaflight 4.1.0 を使用しています。特に特別な設定はしていません。PIDやフィルターもデフォルトのままです。
後部カメラを使用するには送信機側の設定が必要です。カメラ切り替えのスイッチと共にロールとピッチを逆方向になるように設定する必要があります。これをしないと後部カメラの映像を見てるときは操作が反対になるからです。
以下、FrSky Taranis Q X7 での設定画面です。
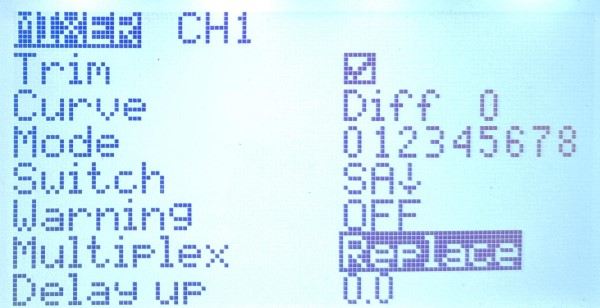
MIXER画面で、ロール用のチャンネル(通常1CH)を選択してENTキーを長押しします。表示されたサブメニューから[Insert After]を選択すると下に1行挿入されますのでこれを編集します。
[Source] に INPUT の Ail を設定。[Weight] をー100にします。これで方向が逆になります。
続いて [Switch] に実際に使用するスイッチを割り当てます。下の図で SA↓は、 Aスイッチの3ポジションのうち一番下にした時に当たります。
そして [Multiplex] では [Replace] を選択します。これは本来のエルロン(CH1)の設定を置き換えることになります。
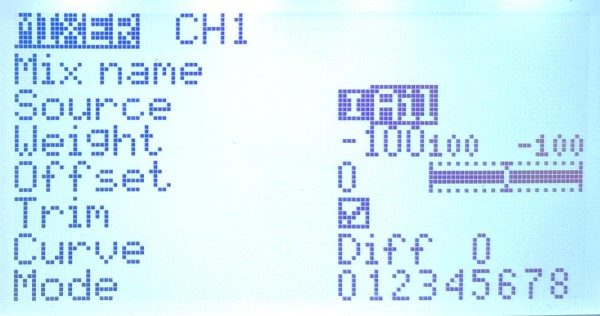
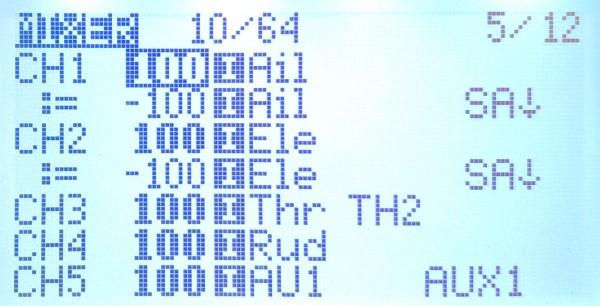
同じようにピッチ(エレベーター)も設定します。もちろん同じスイッチを使用します。こうして設定したMIXER画面は下の図のようになります。Aスイッチが一番下になったら、INPUTで設定したAilという名前の設定のWeightを100からー100に置き換える。ことになります。
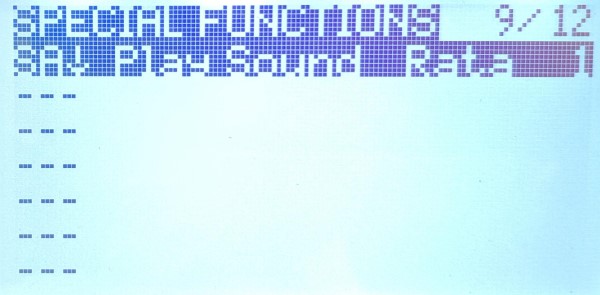
なお、知らずにAスイッチが入ったままになっていて操作が逆になり事故るといけないので、Aスイッチが一番下になっている時はアラームを鳴らすことにしました。
SPECIAL FUNCTIONS ページで、SA↓でRataという名前のアラームを鳴らす設定です。
なおカメラ切り替えのスイッチは同じようにAスイッチになっています。INPUTページでAスイッチをAUX7とか適当な名前で割り当て、MIXERページでCH7に先ほど割り当てたAUX7を割り当てます。
Betaflight のモードタブでは何もする必要はありません。カメラ切り替えボードが勝手にCH7を読み込んで判断します。
フライト動画
実際に使用している様子がこれです。前 → 後ろ → 前 と切り替えています。
カメラ切り替えと同時にロールとピッチが逆方向になるので、切り替え時に両方とも出来るだけニュートラルにしておかないと切り替えた瞬間におかしくなります。私の場合はさらにスイッチに触った時にスロットルスティックが動いてしまいました。いずれにしろ慣れると何とかなりそうです。
上の動画は木々の間をバックで抜けていってるので、バックしているってことが分かりやすいですが、何もない平面でバックすると分かりにくくなります。ひどいと空しか映らなくなるのでw
実際に飛ばしてみると思ったよりも楽しいです。いつかダイブでやってみたいなあ。通常は高所から地面に向いてダイブするけど、FPVカメラを後ろに切り替えて地面を目指せば、録画カメラは上を向いたまま後ろに落ちるような絵が撮れそうですw

