

Betaflight 設定の確認
全般設定
Betaflight のデフォルト設定は以下からダウンロードできます。
こちらはフルダンプです。
Betaflight のバージョンは、3.5.7 で、ターゲット名は、CRAZYBEEF4FR です。
(最後のFR は レシーバーが FrSky バージョンの場合)

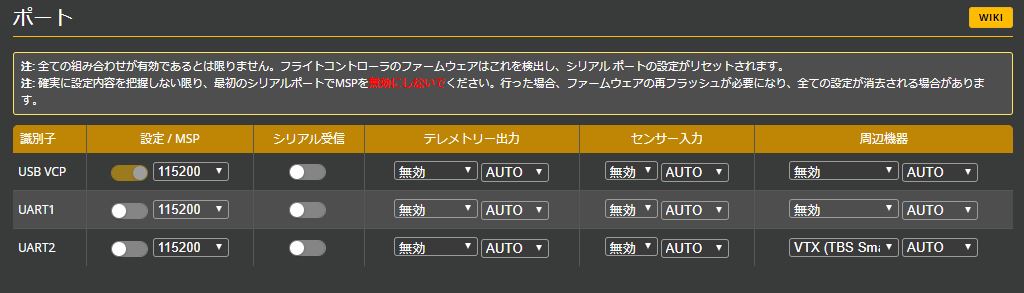
ポート設定。レシーバーは内蔵ですので、UART1 が空いています。外付けレシーバーを使用する場合は、UART1 の「シリアル受信」をONにします。UART2 はVTXコントロール用の SmartAudio で使用します。
基本設定。プロペラ回転方向が逆(プロップアウト)になっています。モーターアイドルスロットル値が 10 と高めです。
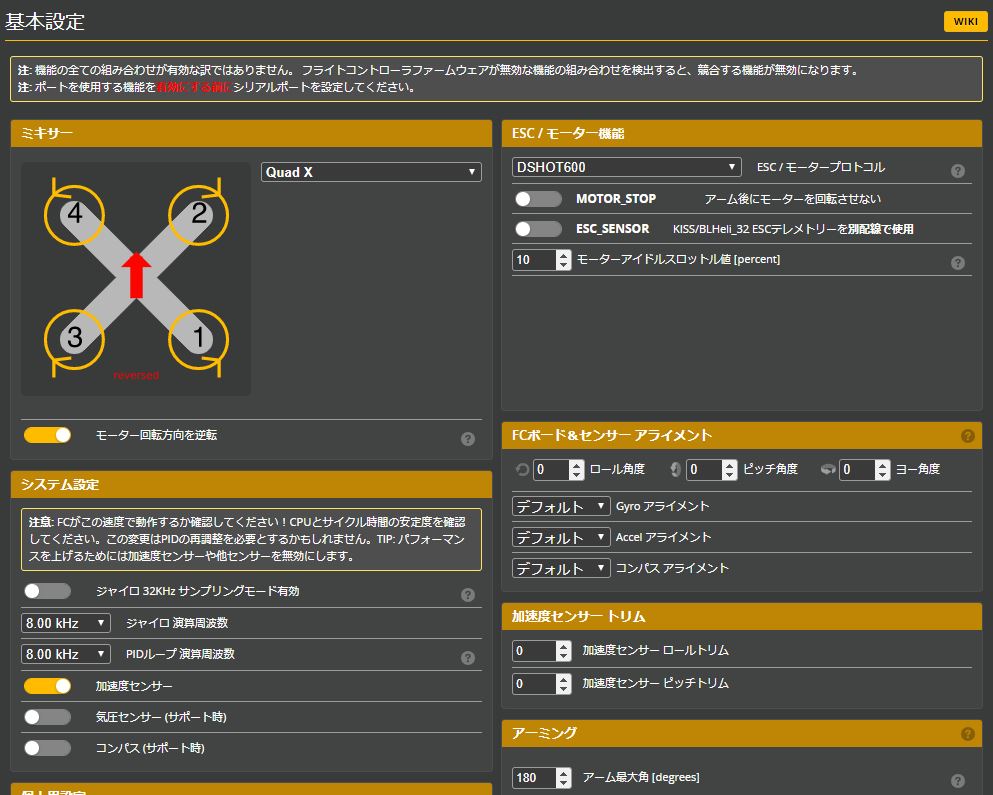
AIRMODE(エアモード)が常時ON になっています。私はここで常時ONにせずにモードで選択できるようにしました。室内などでゆっくりとシネマティックに撮影したい時にエアモードは無効にしたいからです。
電源・バッテリー。警告電圧が3Vで、最小電圧が2.9Vに設定してあります。この設定は実際にフライトして適切か確認していきたいと思います。(ノーマル Mobula6 が2.9Vで設定が飛んで初期化されていたので怖いから・・)

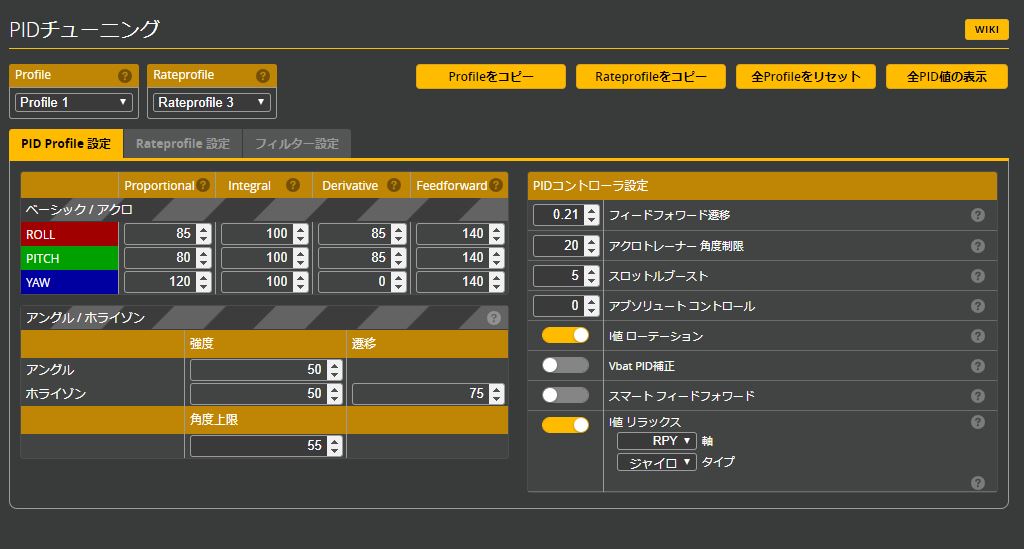
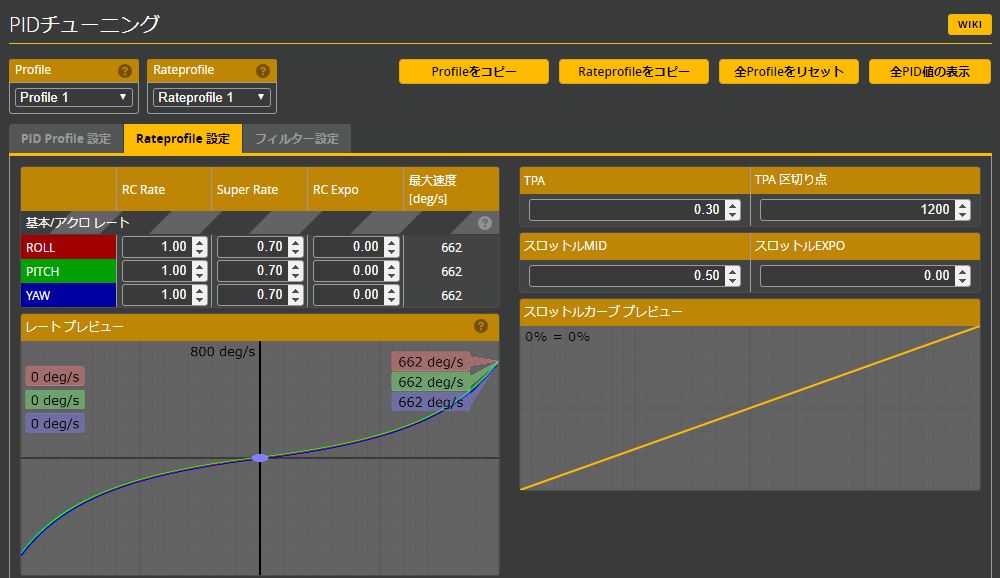
PIDは結構高めに設定されています。まずこのままフライトしてみましょう。
レートは Betaflight のデフォルトのままです。お好みに設定しましょう。HD機ですのでゆっくりとシネマティックに撮影したい時は最大速度を思い切って下げてみるのもいいかと思います。RC Expo も設定して、スティックが中央付近にある時の反応量も落としておくといいでしょう。なお、スロットルに関してはここだけでは詳細に設定できないので、私は送信機にスロットルカーブを設定して使用しています。
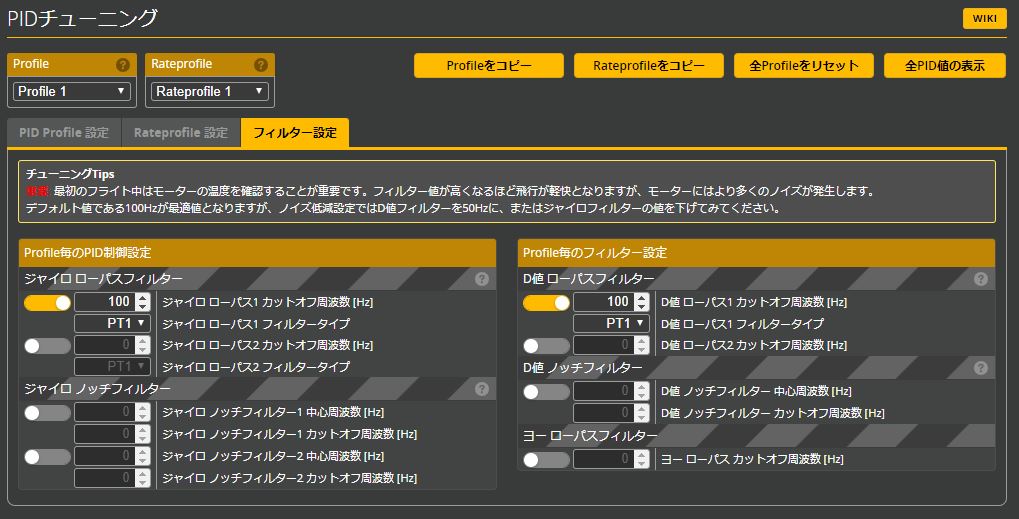
フィルター設定もそのままでフライトしてみます。
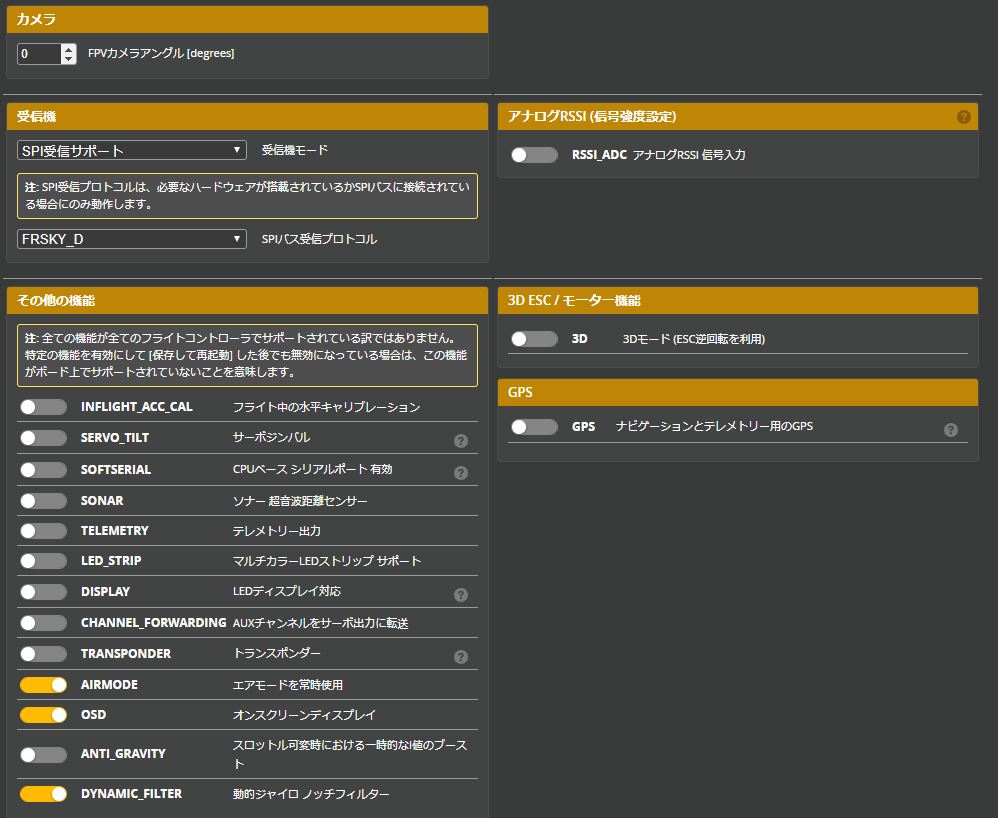
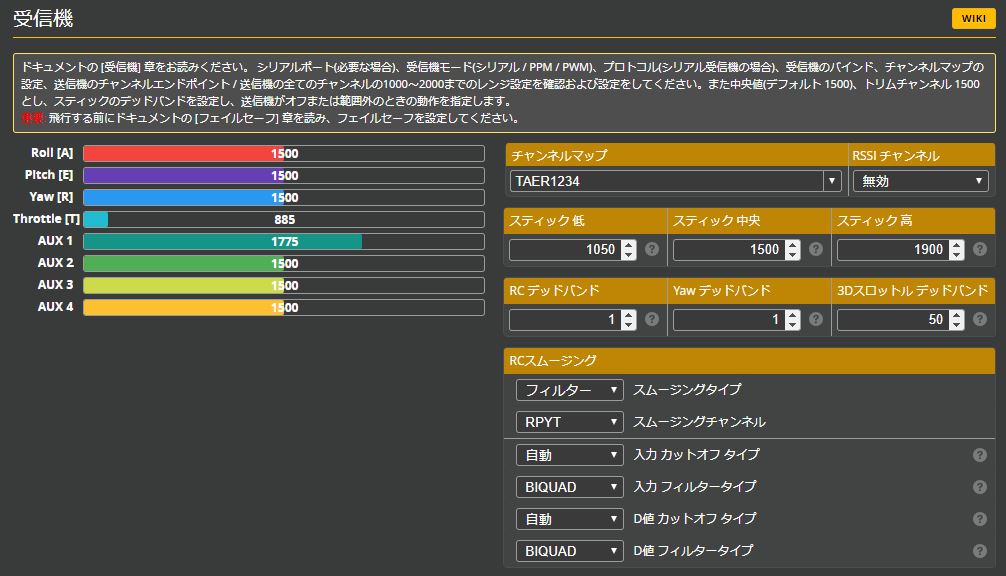
受信機設定。内蔵SPIレシーバの場合は何もしなくてもRSSI値がOSDに表示されます。ここでも、シネマティックに撮影したい時は、デッドバンドを設定しましょう。スティックが中央にある時の自然なブレを無視する設定です。例えば Roll[A] の値が1497~1503の間でゆらゆら揺れている様なら、 RCデッドバンドに3を入力します。
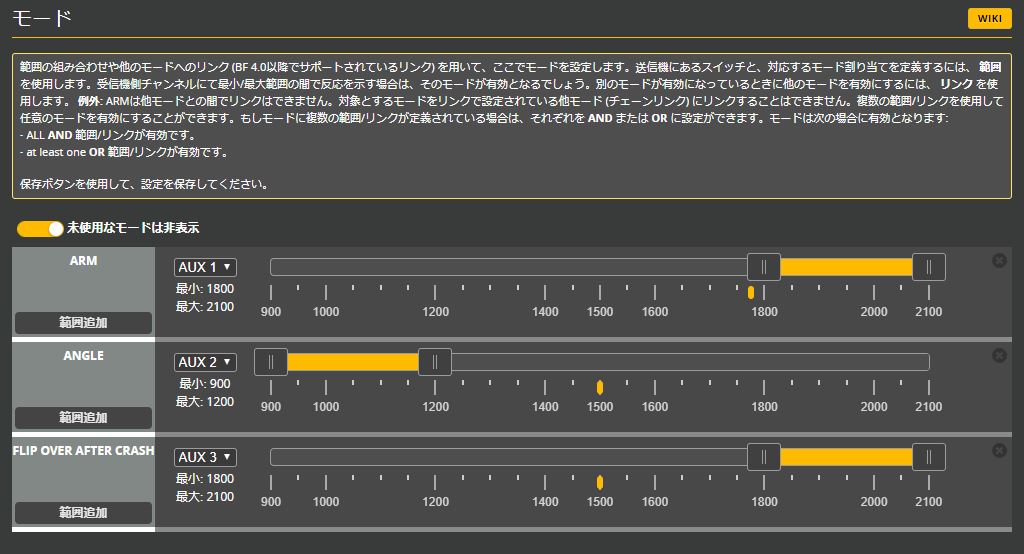
モード設定。最低限の設定がしてありますが、自分の設定に変更します。私は基本設定で、AIRMODE を OFFにしましたので、ここでスイッチ(AUX)でAIRMODE を ON/OFF 出来るようにしました。
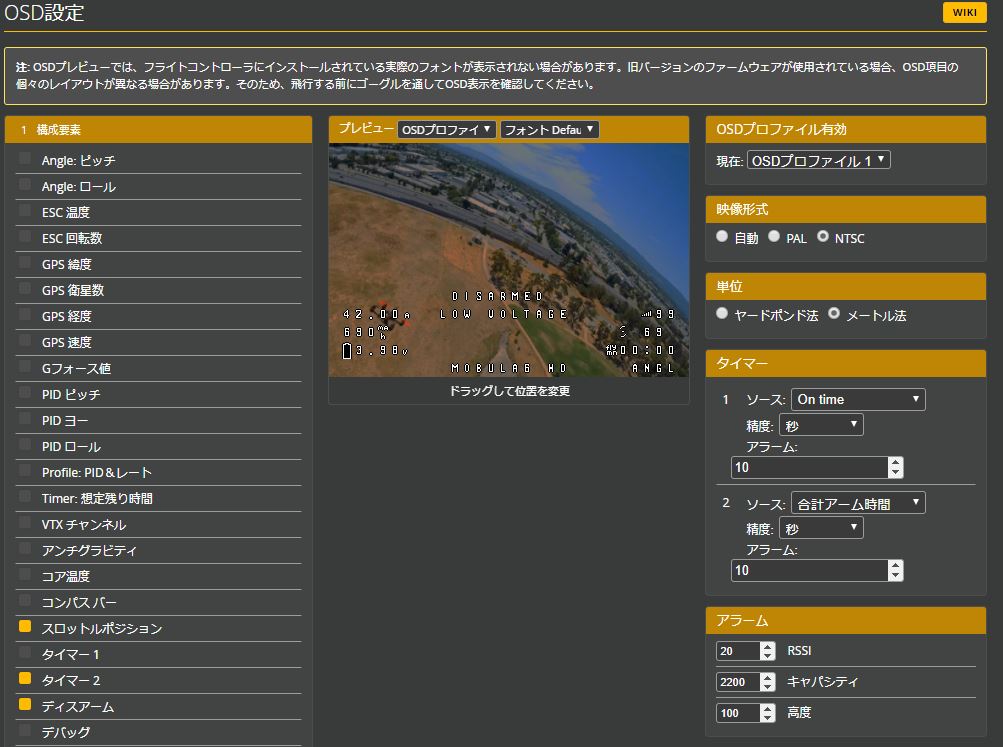
OSD設定。好みの設定にしましょう。
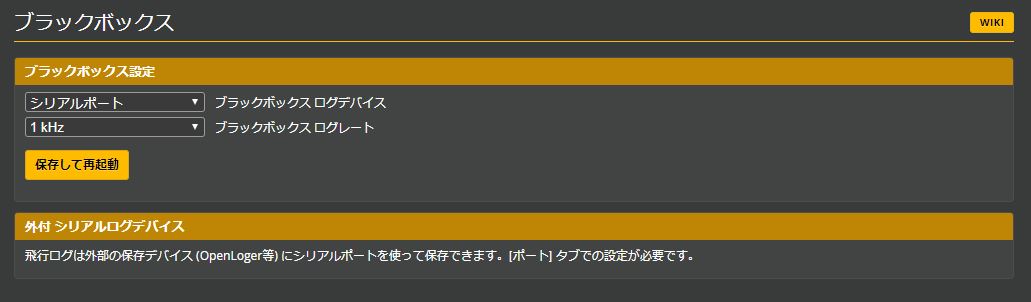
ブラックボックス用のメモリは搭載されていないので、ここは無効に設定しておきます。CPU負荷が軽減されます。
送信機とバインド
FC 内蔵SPIレシーバーをバインドモードにするには2つの方法があります。
1、FC裏面のBINDボタンを使用する方法。これは簡単です。電源が入った状態でBINDボタンを押すだけでBINDモードになります。
2、CLI からコマンドで行う方法。CLI で次のコマンドを入力します。
bind_rx_spi Enter
レシーバー側をBINDモードにしたら、送信機も BINDモードにします。
VTXの設定
FC に内蔵された VTX には設定を変更する押しボタンはありません。したがって使用するチャンネル等は CLI でコマンドを入力して行うか、ゴーグルで Betaflight の OSD 表示を見ながら行う必要があります。
ここでは CLI で設定してみます。
set vtx_band = 3 set vtx_channel = 1 set vtx_power = 2 set vtx_low_power_disarm = ON save
FC 内蔵の VTX は25mwの送信出力と説明されていますが、vtx_power = 2 とすることで、50mw 位出ているようです。
ESC設定の確認
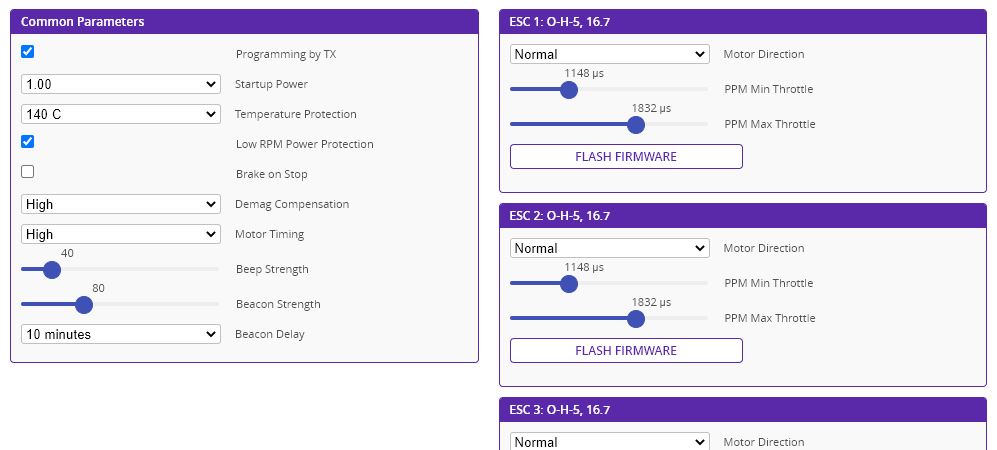
ESC は FC 内蔵の 4IN1タイプです。BLHeli Configureatr で確認します。ここではバッテリーを接続しないと設定を読み込めません。
ESCファームウエアは、バージョン16.7 。ターゲット名は O-H-5 です。Betaflight自体がRPMフィルターに対応していないバージョンですので、ESCファームウエアもRPMフィルターに対応している物ではありません。
Common Parameter では、「Startup Power」が 1.00 に上げてあります。また、「Motor Timing」が High に変更してあります。
まとめ
ここまで機体と設定を確認してきました。カメラ以外ノーマルMobula6 とほぼ同じ機体ですが、ノーマルMobula6 で発生していたいくつかの問題が解消しているのか気になります。またHD化したことにより機体重量が1.35倍になったことが、軽さを売りにしていたMobula6のフライトにどういった影響を与えるのか?とても気になります。
次回 Part2 はフライト編です。




