

HappyModel Mobula6 2024は重さ17g台と超軽量のTinyWhoopです。モーターも高回転タイプが採用されておりレース機としてもよさそうです。
今回は軽く写真での紹介と、機体設定で気になる点があったのでその訳と修正方法を記載します。

※ 当記事内にはアフィリエイトリンクが含まれています。サイト運営のためこのリンクからアクセスしていただくと助かります。
HappyModel Mobula6 2024 スペック
Mobula6 2024 は軽量化のためVTXとレシーバーも搭載したFCを採用しています。
モーターは一回り小さい0702サイズの高回転タイプを採用。KV値は28000です。高回転タイプは最近にはやりですね。
もちろんレシーバーはExplressLRSでシリアル接続ですので単独でファームウェアを更新できます。
キャノピーも軽量化して機体重量は17.7gととても軽いです。
| FC | SuperX ELRS AIO 5-IN-1 ジャイロ:BMI270 4in1 ESC:5A Bluejay レシーバー:ExplressLRS シリアル接続 2.4GHz VTX:OPENVTX 25、100、400mw バッテリーコネクター:AM30 |
| モーター | SE0702 KV28000 1.46g |
| カメラ | FX17-B 1/3″ CMOS FOV150° NTSC 14mm x 14mm 1.5g |
HappyModel Mobula6 2024 マニュアル
外観チェック
付属品です。予備のキャノピー(もうこれをキャノピーと呼んでいいのか疑問ですが、カメラマウントですよねw)、予備のプロペラが2種類2ペアづつ。予備のねじもあります。

機体です。

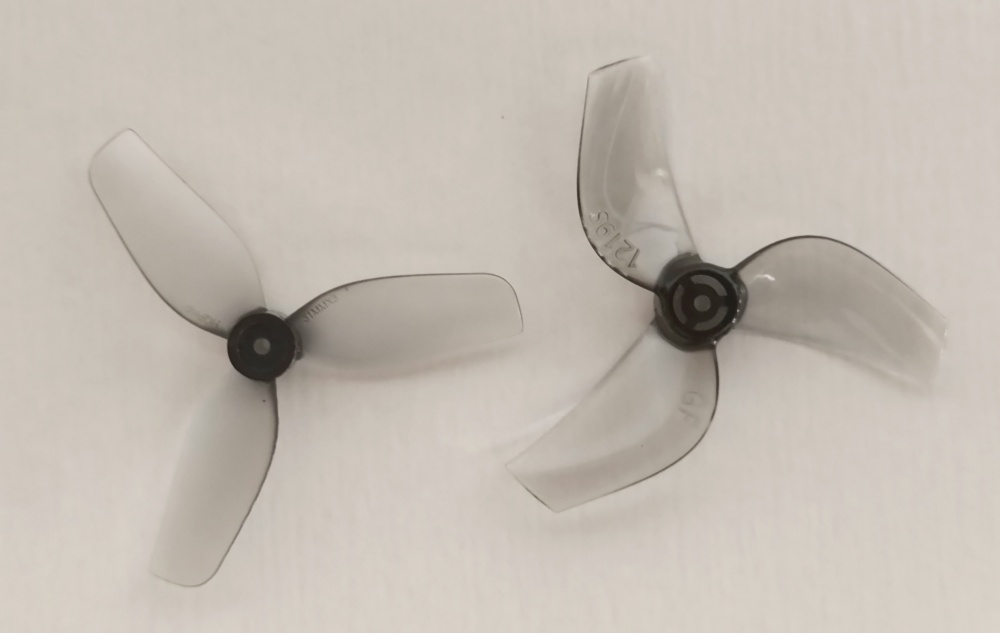
予備のプロペラは、左がHQPropの1211、右がGemfanの1219です。ピッチが違うので比べてみるといいですね。
あらかじめ機体についているのはGemfanのほうです。あと予備のネジは3種類(FC固定用、モーター用、カメラ用)とドライバー。そして役に立たないペラ外し・・・

左:HQPropの1211 右:Gemfanの1219

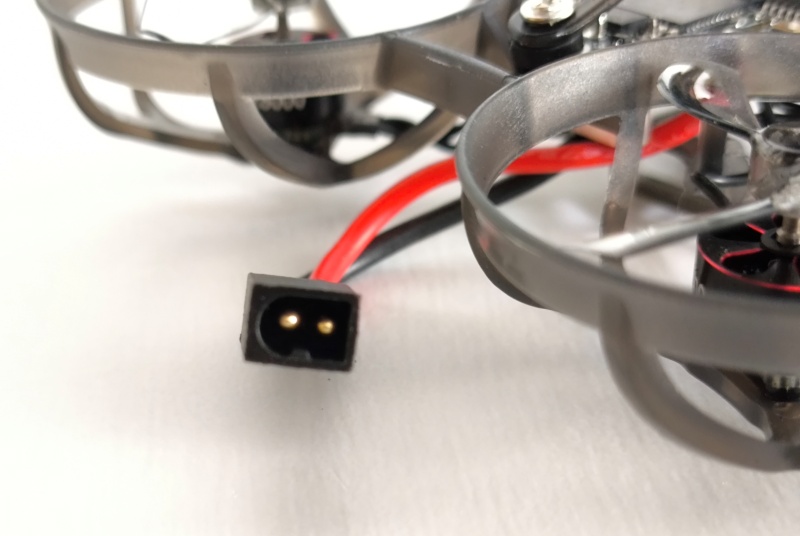
バッテリーコネクターはGNBのA30タイプです。これはBETAFPVのBT2.0コネクターと互換性があります。写真のようにメス側に突起がありますがそのままでBT2.0コネクターが挿さります。
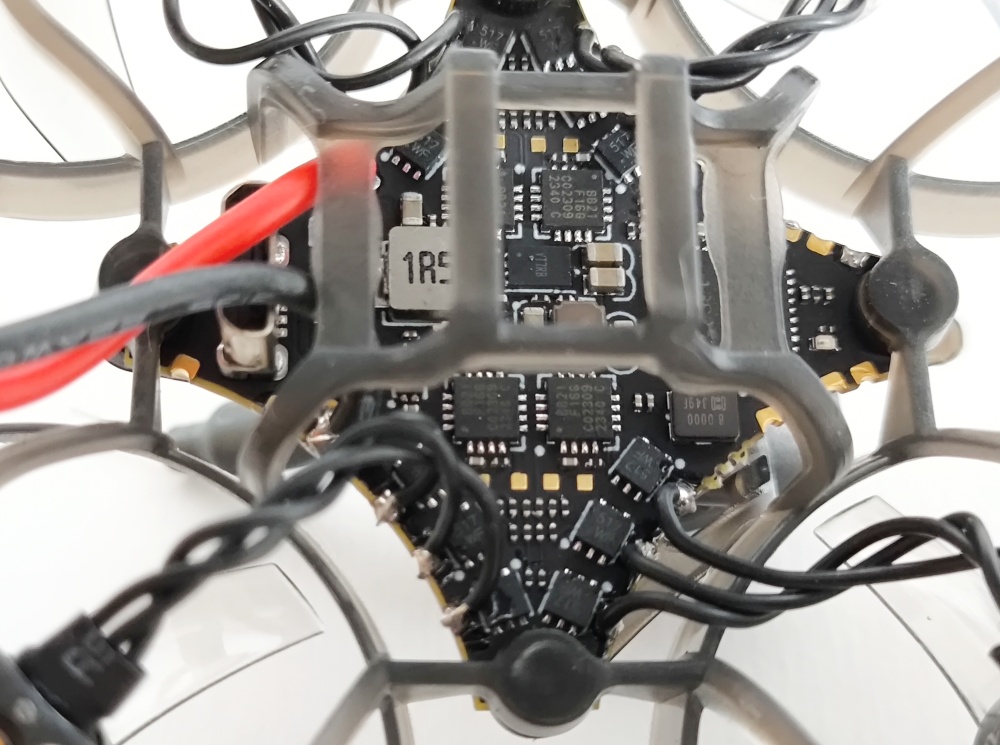
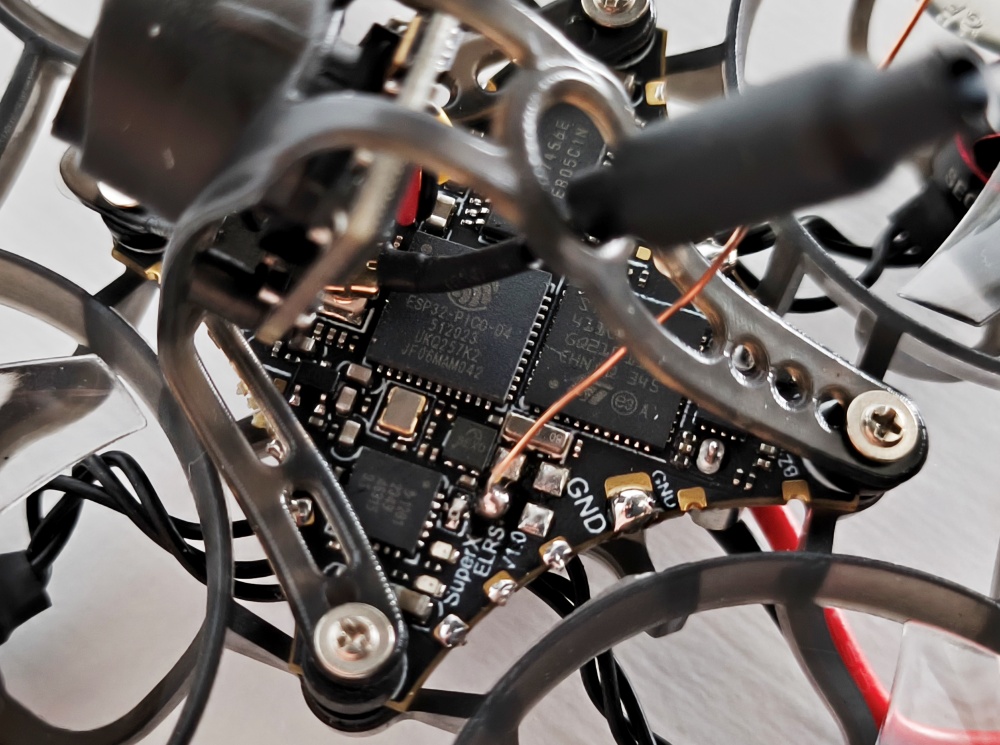
ExpressLRSレシーバーもVTXも搭載したFCなのでカメラとアンテナ以外は何もなくすっきりしています。
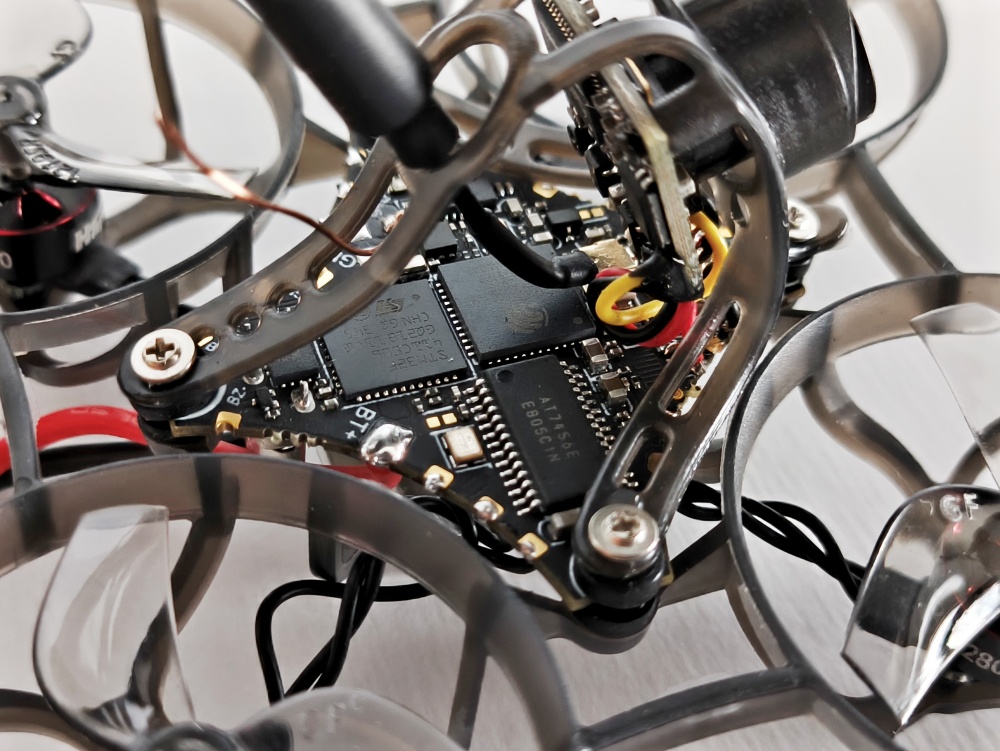
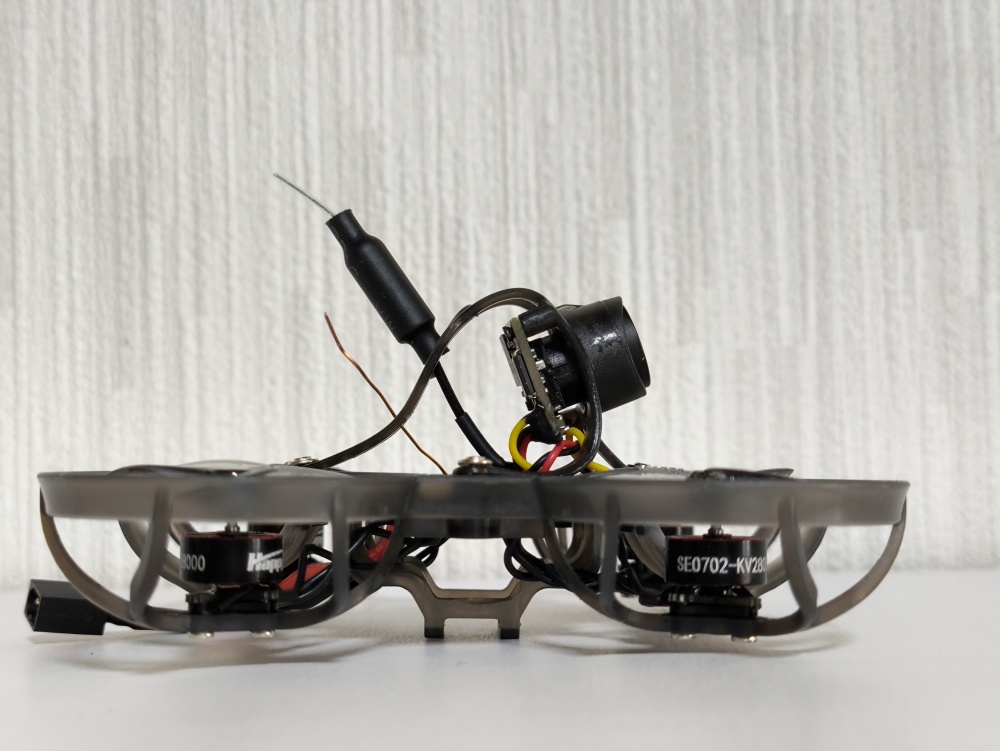
モーターはSE0702 KV28000 と高回転型です。

軽量化のためモーターの配線はコネクター接続ではなく、直接FCにはんだ付けされています。
ExpressLRSレシーバーのアンテナです。細い銅線が1本だけです。しかもやわやわなのでしょっちゅう変形してしまうのは前作と同じですね。
FX17-Bというカメラ。可もなく不可もなくといった感じです。

デフォルトでカメラ角度は最小になっていますが、それでもこの角度があります。
予備です。

正面から。バッテリーホルダー部分の寸法は、幅10.5mm 高さ6.7mm

公称値より0.1g軽いw

BetaflightとESC設定
Betaflight
Bataflightのバージョンは4.4でした。

ポート設定
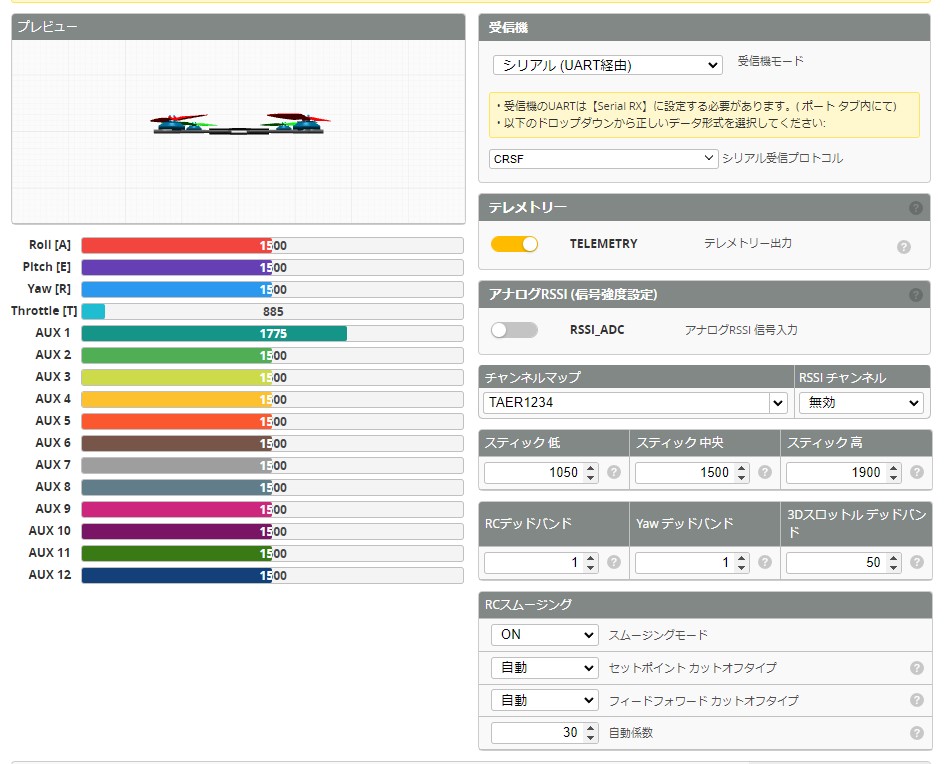
UART1の「設定/MSP」と「シリアル受信」の両方がONになっています。これは内臓のVTXの設定変更にも使われるからですね。

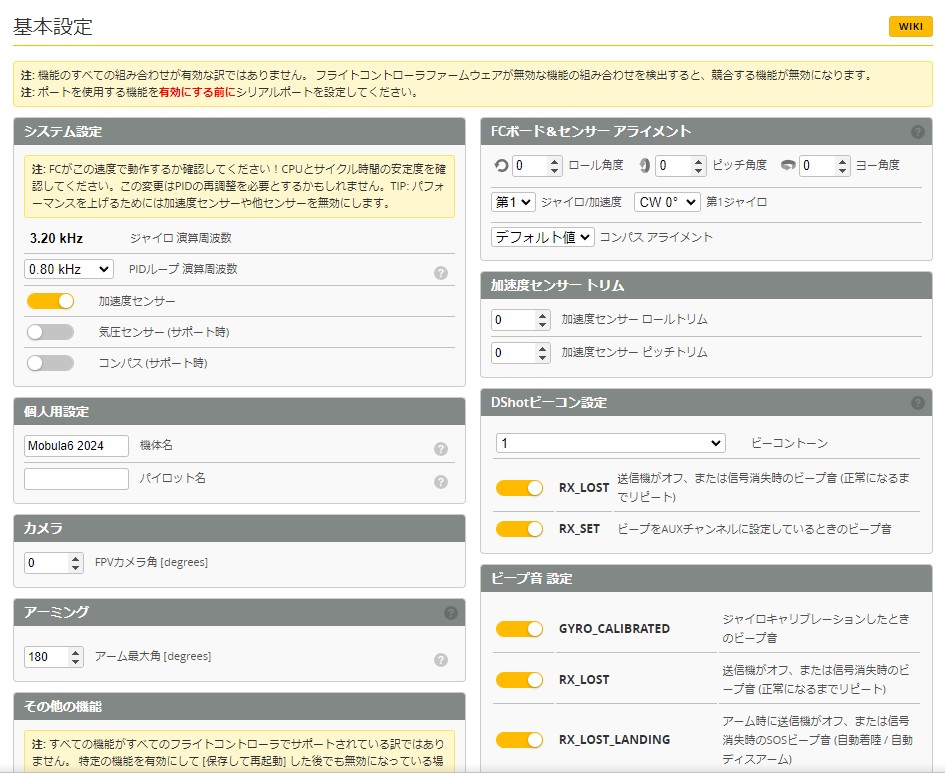
なぜか「PIDループ演算周波数」が0.8KHzになっています。1.6KHzに変更しておきましょう。そのほかの機能でAIRMODEがONになっています。レース機としてエアモードが不要な場合はOFFにして、モード設定で必要なときのみにエアモードを有効にできるようにスイッチを割り当てたほうが良いですね。


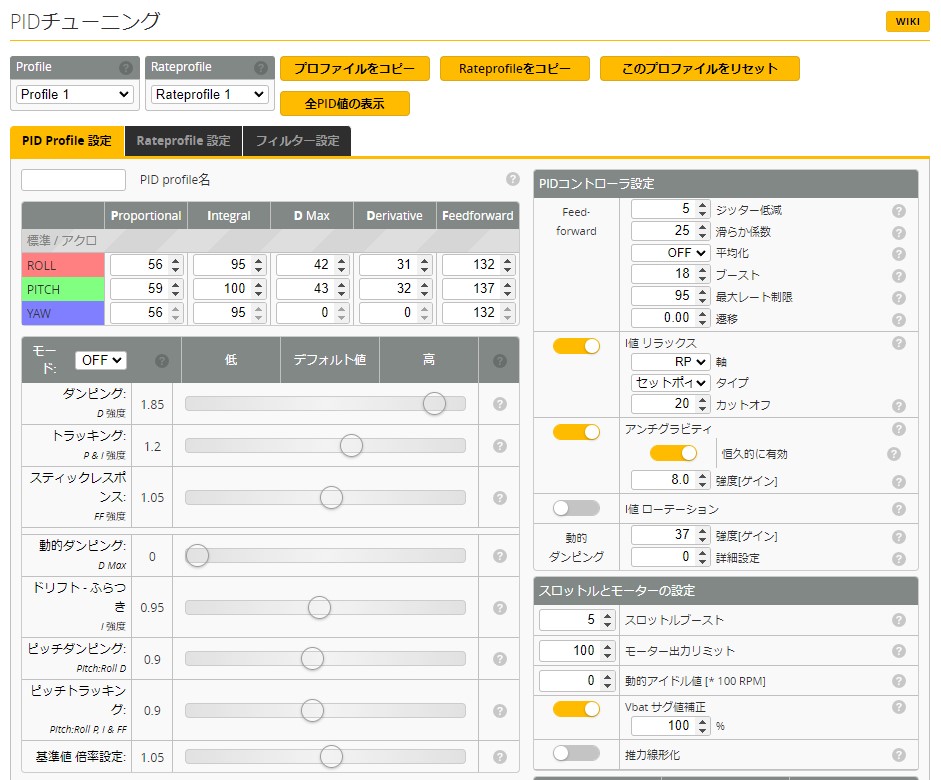
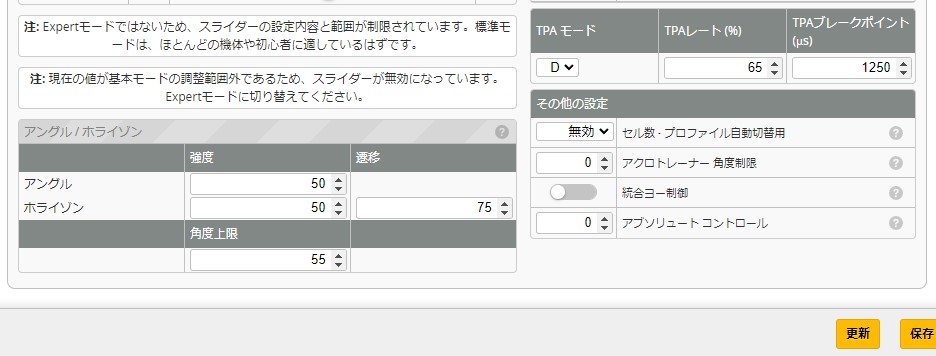
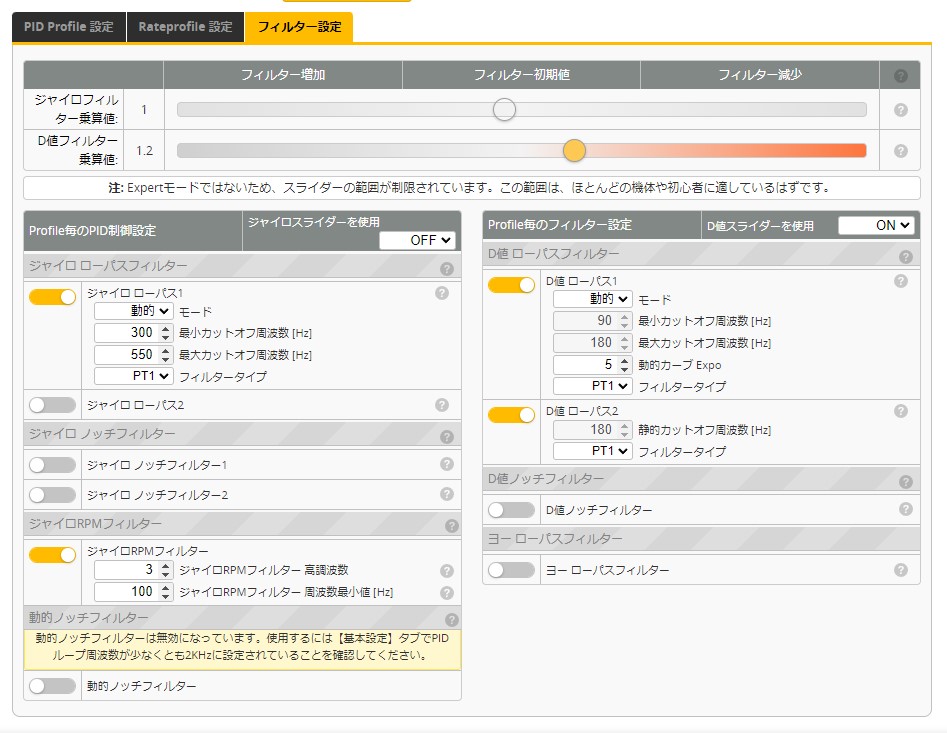
PID設定とフィルターは設定済みでした。レートはお好みに設定します。
内臓レシーバーはExpressLRSです。
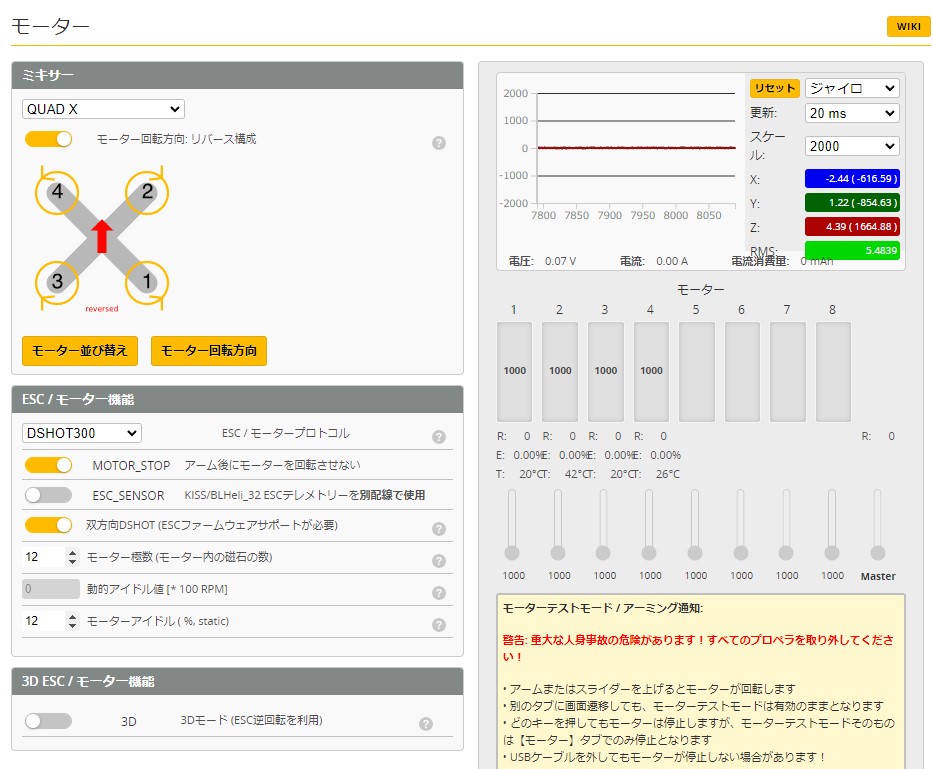
モーターストップがONになっています。アームしていても分からないのでOFFにします。
ESC Bluejayの設定
ESC設定を読み込んだら驚愕しました!!
Max Startup Powerが2020(フルスロットル)になっていたのです。
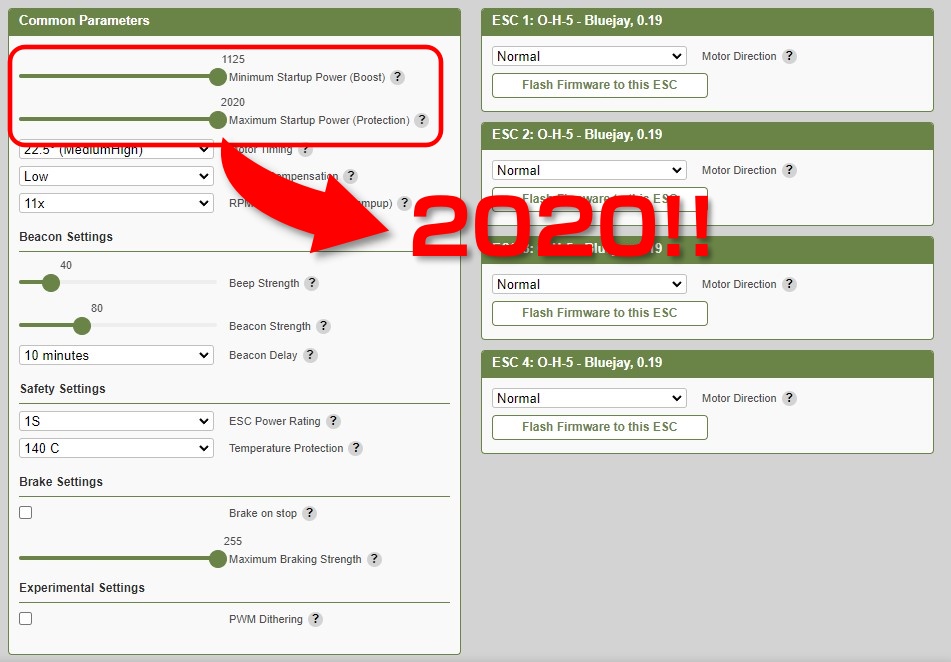
このStartup Powerの数値は、モーターを回転させ始めるときに、Minimum Startup Powerで設定した値でモーターの回転開始を試みます。モーターが回らなければMaximum Startup Powerまで徐々に上げていきます。
しかし、ある程度までStartup Powerを上げてもモーターが回らない時は何かしらのトラブルがあるときです。例えば、プロペラが折れてダクトと接触して物理的にモーターが回せない時や、クラッシュ時にひっくり返ってしまい何かがプロペラにあたっている時などです。この時にモーターが回らないにもかかわらず多大な電流が流れるとモーターやESCが熱損します。これを防止するためにMaximum Startup Powerの設定があるのです。
Mobula6 2024のデフォルト設定が異常だという事が分かったと思います。
ここでMobula6 2024のマニュアルを見ると下図のように設定するように記載されています。1100と1200ですね。
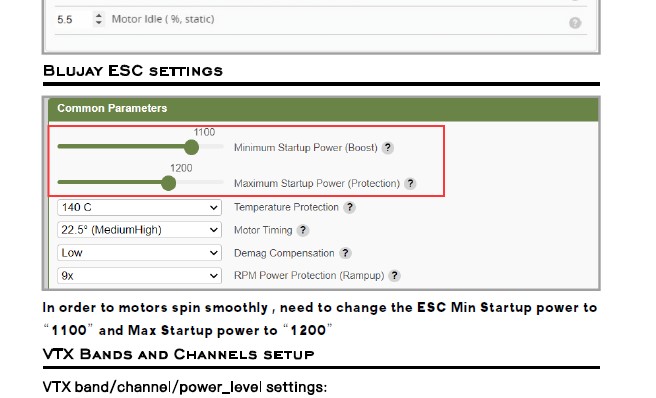
マニュアルに記載されている通りに機体側の設定がされていないのはなぜ?もしかしたらこの機体だけかもしれませんが、ESCを壊してしまわないように一度確認をしておきましょう。
このStartup Powerの数値は小さければ小さいほど良いです。モーターが回り、回転中も引っ掛かりなく(デシンク)回る最小値に設定します。
実際に数値を変えて試したところ下図のようにMinが1075で問題なく回りました。Maxは少し上の1120に設定しました。ついでにBluejayのバージョンも0.21にアップデートしました。
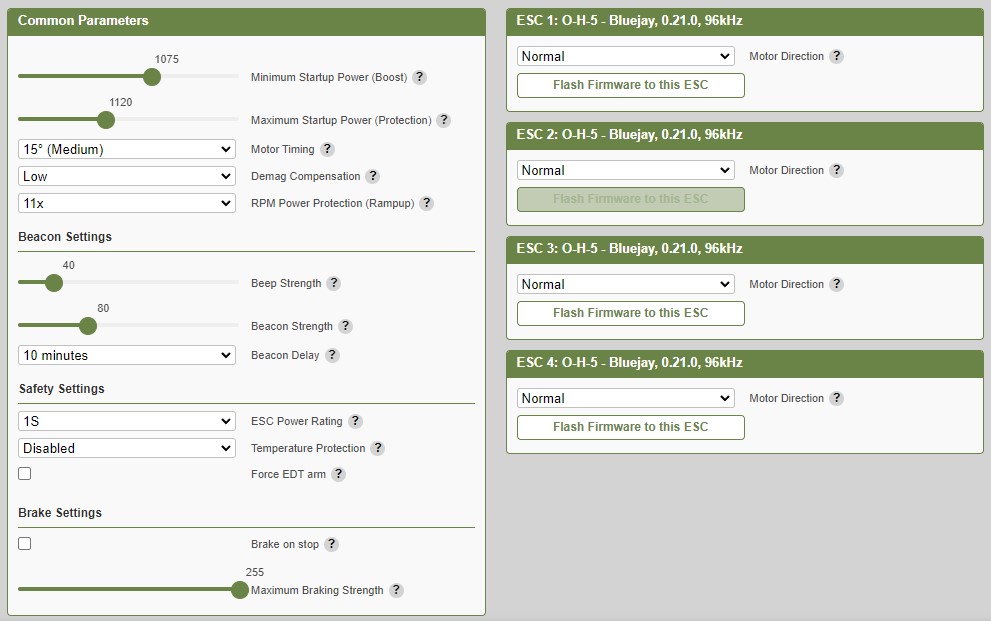
ちなみにMotor Timingは22.5°から15°に変更しました。このタイミングについてはChris Rosser氏のTinyWhoop用の小さなモーターについての実験のビデオが参考になります。Youtubeで見られます。

その他 & まとめ
バッテリーケーブル
バッテリーケーブルがこの長さなので、バッテリーが写真のようにコネクタタイプだと届きません。

そこで少し改造をします。一度はんだ付けを外して、下図のように逆向きにしてはんだ付けしました。こうするとケーブル無しのコネクタタイプのバッテリーでも余裕で挿すことができます。むしろ長すぎるくらい余裕があるので切り詰めてさらなる軽量化をするのも良いでしょう。

全周LED搭載
最近のTynyWhoopのレースでもLEDの搭載が義務付けられていることが多くなりました。そしてどうせならとWhoopダクトの全周にLEDを巻き付けるのが流行っています。HappyModel Mobula6 2024のFCにはLEDストリップの端子がありませんが、5Vで光らせるだけのLEDなら使用する事ができます。
今回使用したLEDはこちら。5Vで幅が3mmという細目のCOBタイプです。

AliExpressで購入しました。
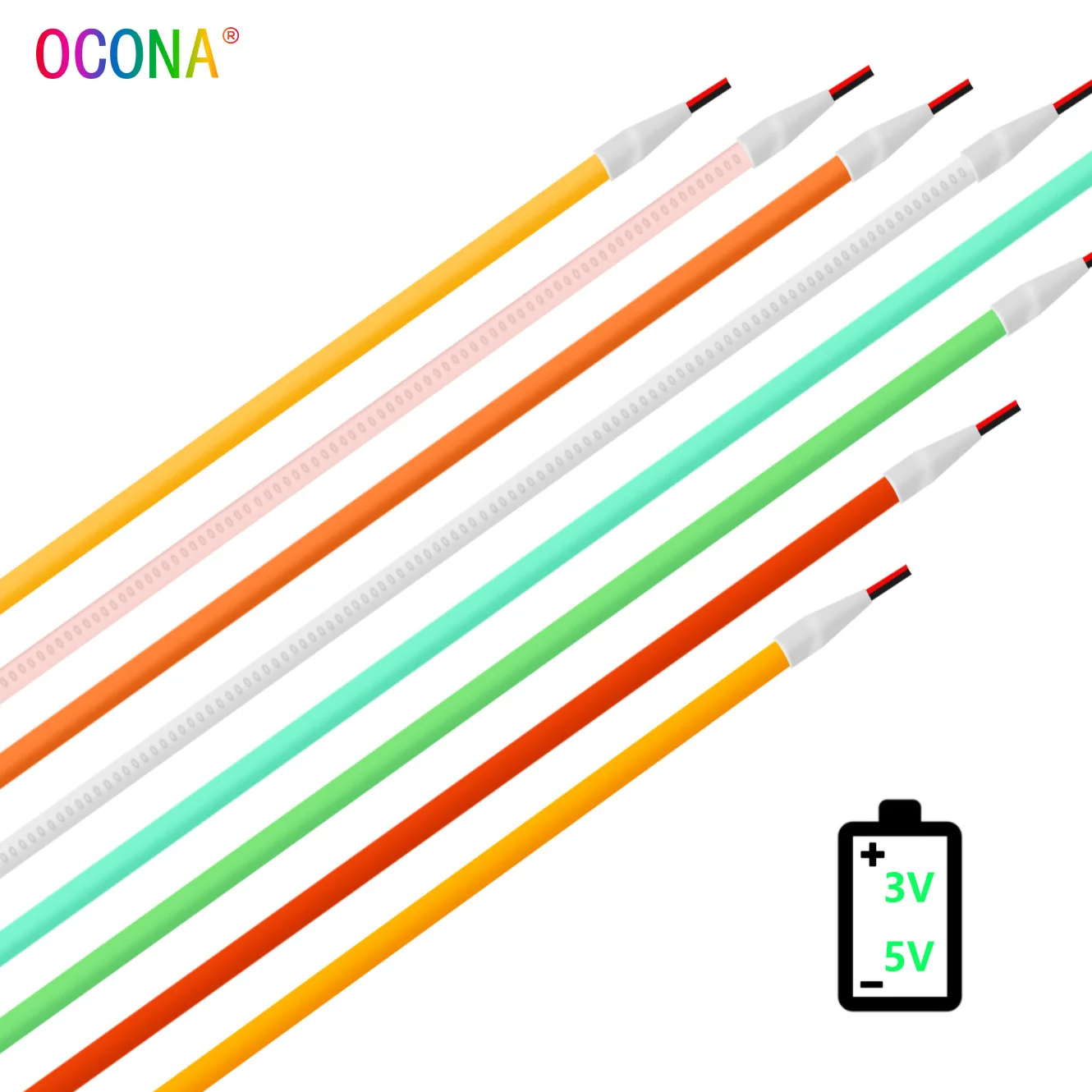
COB LEDは裏面に両面テープが貼ってありますのでそのまま全周に巻くようにしてダクトの外側に貼り付けます。電源はFCの5VとGndパッドにはんだ付けしました。

LEDの開始点と終了点、3か所のダクト間にカプトンテープ補強固定しました。ちなみに約35cmあれば全周に貼れます。

バッテリーを接続するとこんな感じ。思いっきりピンクですww

LED搭載後の重量は19.3gとなりました。
FCの過熱には注意
HappyModel Mobula6 2024 は超軽量でしかも高回転型のモーターを使用しているのでメチャクチャよく飛びます。レース機には最適でしょうね。
軽量化の立役者はVTXとExpressLRSレシーバーも統合したFCなんですが、そのせいかFCが過熱気味です。
BetaflightのOSDにコア温度を表示させて確認すると、ホバリングだけでも90度近くまで達することもありました。常にある程度のスピードで移動していないと温度が下がりません。真夏日だったこともありますが、他の機種よりは格段に温度が上がりやすいようです。
設定変更等でPCとUSBケーブルで接続している時は、常に携帯ファン等で冷却していないと壊れちゃうかもしれませんので注意しましょう。
