

格安のシネフープ機 FUS X111 Pro のレビューPart2です。今回はFC設定編で、初期設定を一通り確認したら実際にフライト出来るようにさらに設定をしていきます。RPMフィルターも導入します。
ガッチリしたダクトを持ったCinematicWhoop機で文字通り映画の撮影のように飛ばす。ほとんど3インチ機でGoProを搭載して飛行する姿はカッコいいです。しかしみんな重いんですよねえ。300g以上あって無人航空機の範囲になってしまうので日本では扱いにくいです。
そこに FUS という聞いたこともない(自分だけ?)メーカーから一回り小さい2.5インチ機で、しかも超軽量のCinematicWhoop機が発売されました。さらにそのお値段が現在なんと$99.99となっています。すでに日本でも手に入れられた方も多いと思いますが、Banggoodさんにサンプル品としてご提供いただきましたので、その実力を見てい行きましょう。
パート2の今回はFCの設定を見ていきましょう。
前回の記事 パート1 はコチラ

FUS X111 Pro は Banngoodで購入できます。

FC設定確認
FCのファームウェアは Betaflight です。バージョン4.1.1 が入っていました

では基本設定から見ていきましょう。
ほぼBetaflightのデフォルトみたいですが、ジャイロの向きに注意しておきましょう。再設定するときとか必要になります。
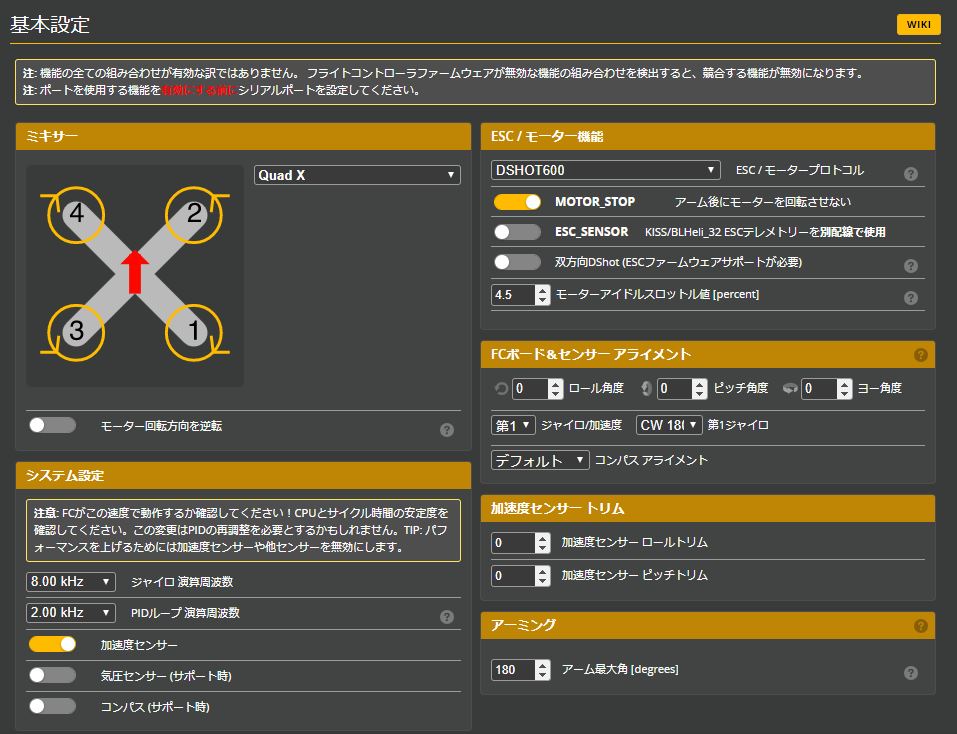
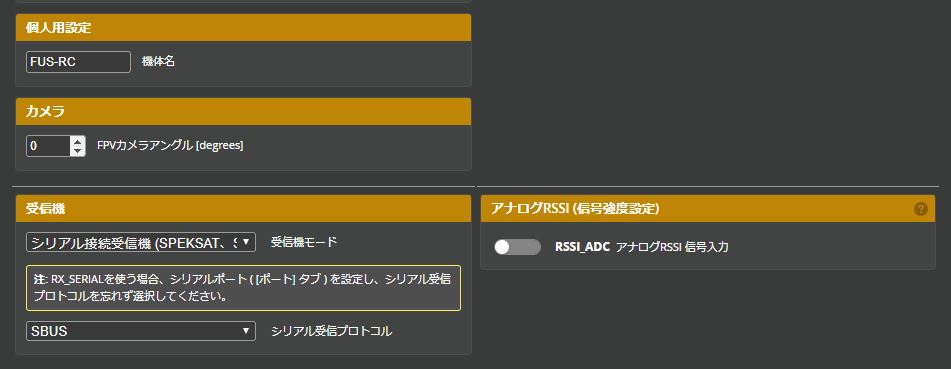
機体名が入力されています。が、メーカー名の様です。fus-rc.com がホームページの様です。
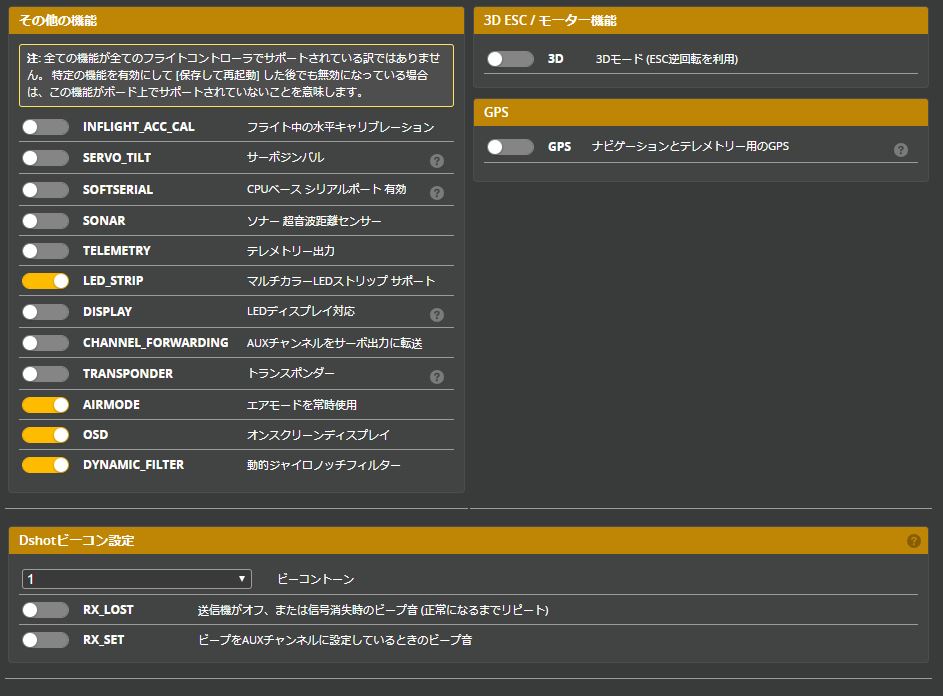
その他の設定では AIRMODE (エアモードを常時使用)が有効になっていますが、私はOFFにしました。これは送信機のスイッチでエアモードの入り切りをするためです。エアモードは主にフリースタイルのトリックをするときに使いますが、今回はCinematicWhoop機という事で、ゆっくりと一定の高度を飛行する時にはエアモードを無効にしたいからです。
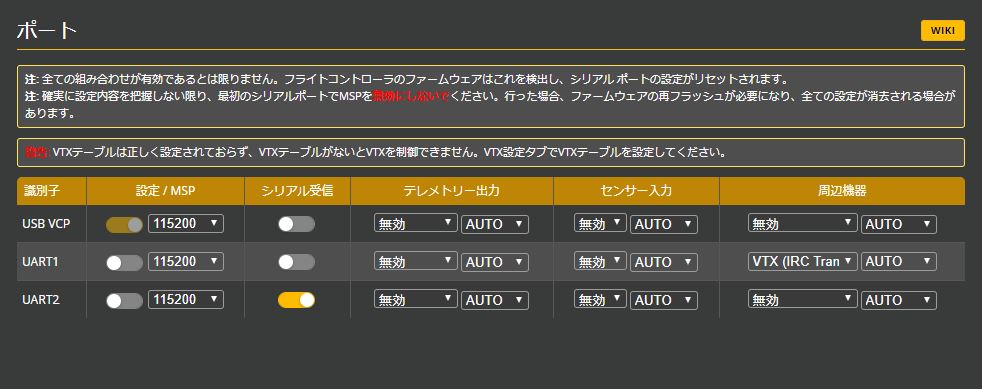
ポート設定
UART1にVTX制御用の設定がしてあります。プロトコルは IRC Tramp ですね。USRT2はレシーバーで使用します。
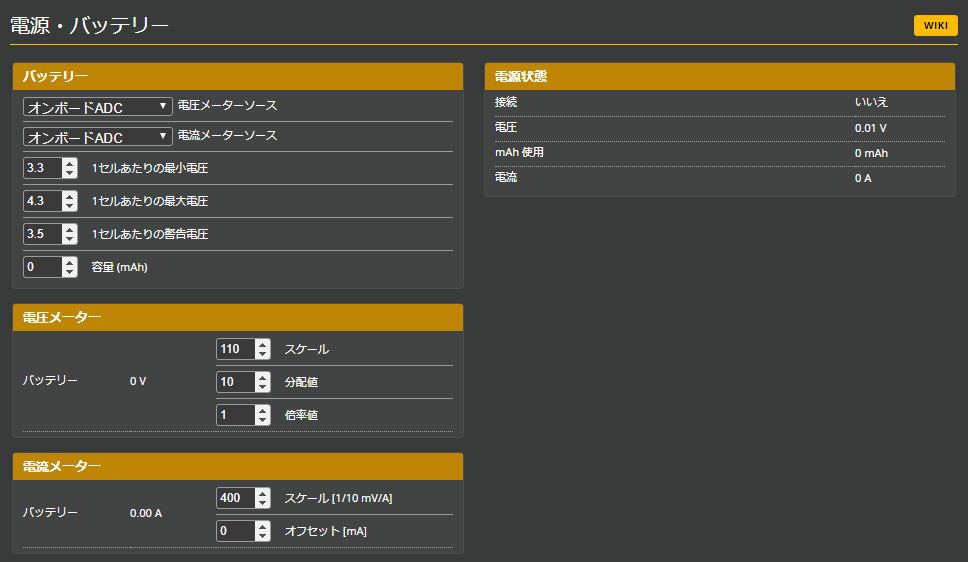
電源・バッテリー ここもBetaflightのデフォルトですね。HVタイプのバッテリーを使用する予定なので、1セル当たりの最大電圧を 4.4v に変更しました。
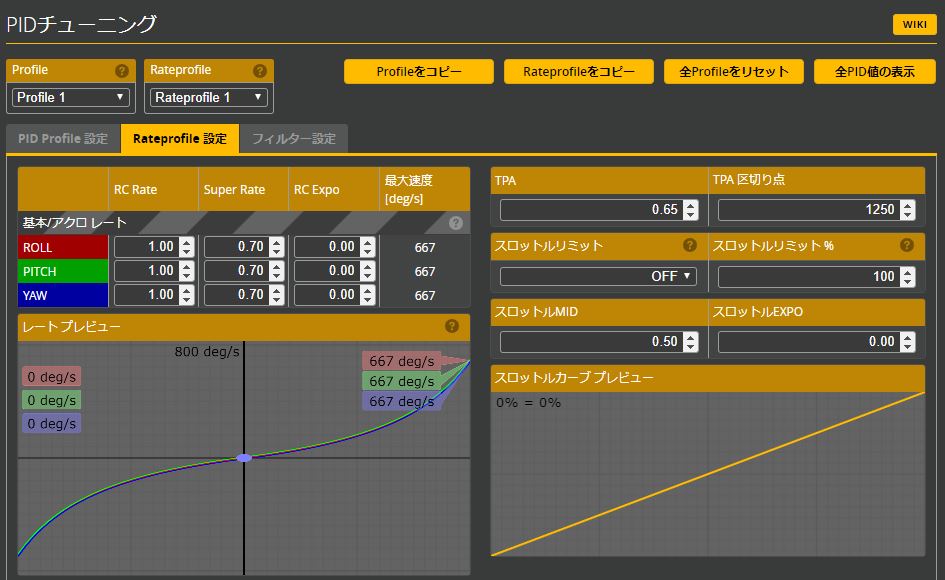
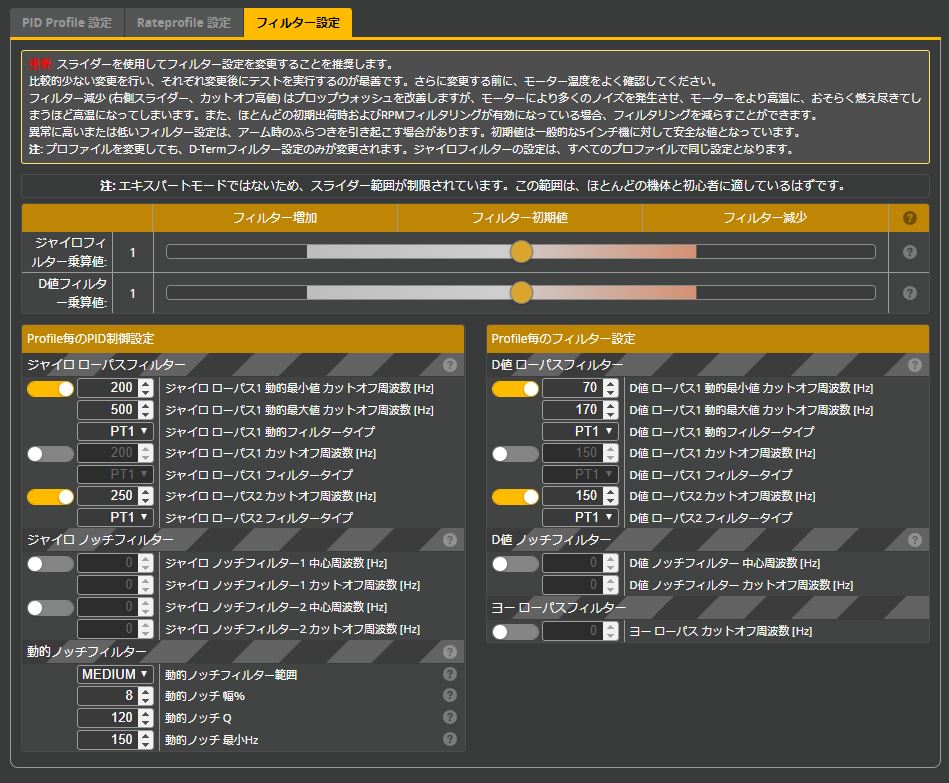
PID設定、レート設定、フィルター設定も Betaflightのデフォルトです。レートだけを好みに合わせて調整しました。

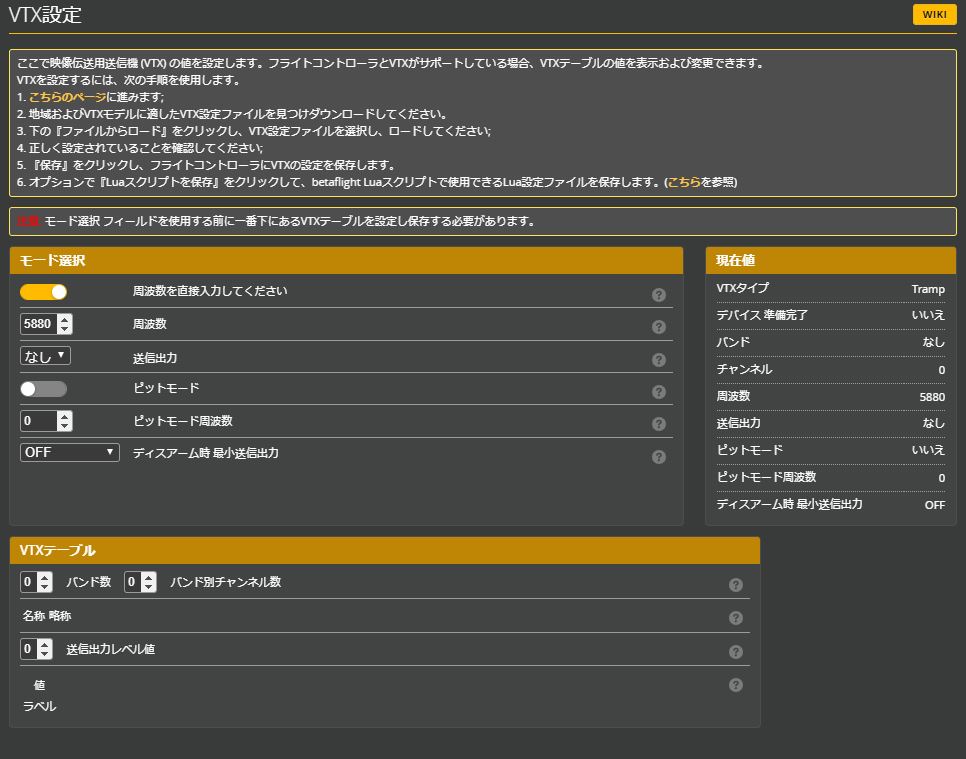
VTXテーブルはなにも設定してありません。日本で使用できる7波だけの専用テーブルを設定するためこの設定ファイル BTFL_vtxtable_JBAND_IRC-Tramp.json をダウンロードして読み込ませます。
LEDは単色の赤色が点灯するように設定してありました。ただ、これでは単に赤いだけですので変更してみます。
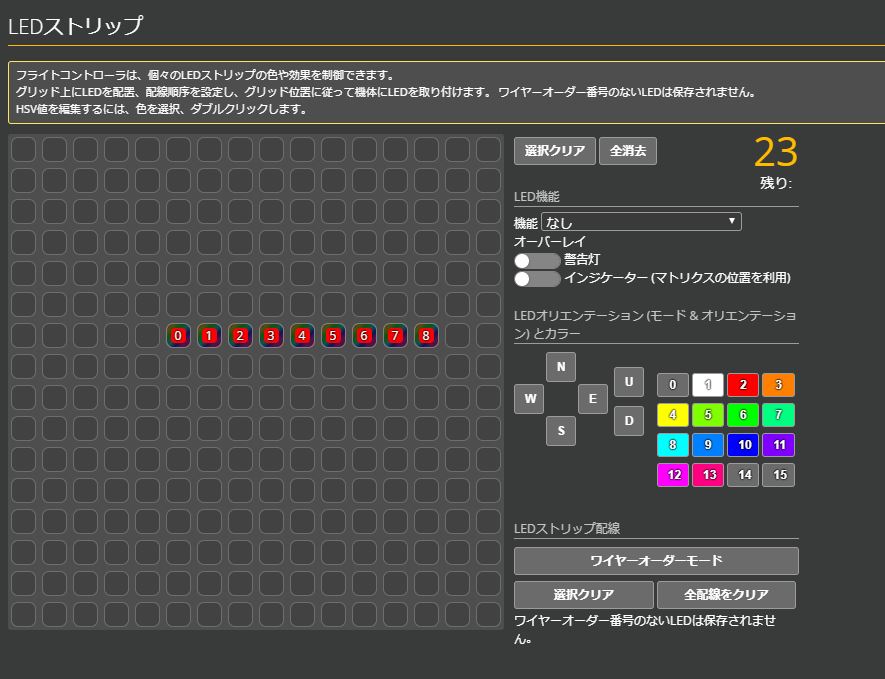
各LEDを選択後、カラーをグリーンに、ラーソンスキャナーをON、警告灯をONにしました。
ラーソンスキャナーはLEDが左右に流れるように表示されるものです。警告灯はバッテリー警告などが出たときに赤色になります。グーリンはお好みでどうぞw

OSDは全く設定してありませんのでここも好みの設定をしていきます。

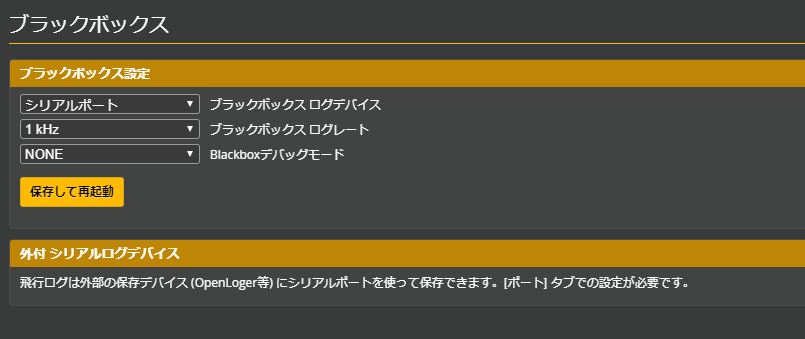
ブラックボックスはありませんので向こうに変更します。(負荷低減のため)
デフォルト設定のDUMPファイルはこちらからダウンロードできます。
今回は設定確認後、一番最新の Betaflight 4.2.2 に更新しました。
また、RPMフィルターを設定し、RC設定等はHDプリセットを設定しました。
Betaflight のプリセットは、下記の Betaflight wiki にあるチューニングノートに記載されています。今回はHDをコピーし、CLIから読み込ませました。

HD (smoothed FF for HD cameras, strong low turn rate smoothness, low iterm relax to minimise bounce back)
set iterm_relax_cutoff = 10
set rc_smoothing_auto_smoothness = 20
set ff_interpolate_sp = AVERAGED_3
set ff_smooth_factor = 40
set ff_spike_limit = 55
set ff_boost = 0
set feedforward_transition = 40
set yaw_lowpass_hz = 70
set throttle_boost = 5
set throttle_boost_cutoff = 10
set dyn_lpf_dterm_curve_expo = 7
set gyro_rpm_notch_q = 800まとめ
見た目にすごく細いカーボンフレームが目につき、すぐ壊してしまいそうな気がしてましたが、いざ実機を手に取ってみるとそのガッチリ感に驚きます。従来と違う、ダクトがフレームを支える構造が強度と軽量化に寄与してるのでしょう。
モーターのマグネットが小さい事や、サイズから1106モーターでは役不足な気がしないでもありませんが、十分に軽いのでかっ飛ばすのでなければ十分かもしれません。
次回はフライトレビューになります。なお、いわゆる「剥きプロ」と呼ばれてる、GoProの中身だけを取り出して超軽量の高画質カメラとしたものを載せて撮影する予定です。
剥きプロのフライト動画はこちらにあります。

FUS X111 PRO は Banggood で購入できます。


