

航空法で無人航空機に当てはまらない100g未満のフリースタイル機のレビューです。
今回レビューするのは、DarwinFPV TinyAPE Freestyle 2.5インチ機です。DarwinFPVはすごくお値打ちな機体をリリースしており、Baby Apeという3インチフリースタイル機はわずか$79.9(記事作成時)で買えちゃいます。Baby Apeはバッテリー込みで100gオーバーしてしまうので、6月20日より施行された改正航空法の無人航空機にあたり、機体登録、飛行の許可・承認が必要です。今回のレビューするTinyAPE Freestyleはバッテリー込みでも100g未満ですので、機体登録や、許可・承認が要りません。もちろんリモートIDも要りませんので今まで通り手軽に飛ばせます。
世界でも類を見ない厳しい規制の日本でも楽しめれるという事で今回もBanggoodさんよりレビュー品を送っていただきました。

DarwinFPV TinyAPE Freestyle のスペック
初めにDarwinFPV TinyAPE Freestyleのスペックを見ていきましょう。
なおTinyAPE Freestyleには2つのバージョンがありますが、FHD撮影用のRunCam Thumb カメラが付属するかしないかの違いだけで、機体そのものは全く同じです。
今回は在庫の関係でRunCam Thumb付きバージョンをレビューします。
主要なスペックは以下の通り。
| 重量 | 55g |
| ホイールベース | 108mm |
| FC&ESC | F411 AIO 15AESC |
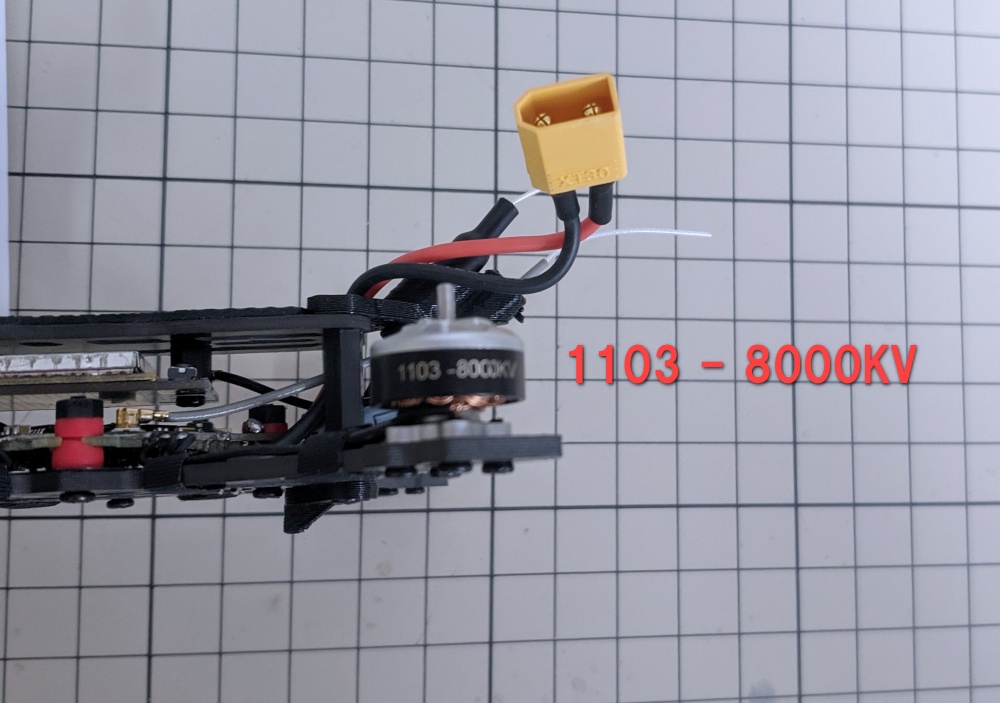
| モーター | 1103 8000KV |
| レシーバー | FCビルトインSPI ExpressLRSレシーバー |
| カメラ | RunCam Nano4 |
| VTX | 25mw~600mw |
| プロペラ | 2512 3枚羽根 |
2.5インチの2S機になります。FCはExpressLRSレシーバーをSPI接続で内蔵していますので、UARTが2つ空いています。VTXは最大出力が600mwもありますので安心です。またESCのファームウェアは初めからBluejayの48KHzがフラッシュしてありますのでRPMフィルターも簡単に使用できるようになっています。
UNBOX & 機体チェック
DarwinFPVのトレードマークはお猿さん(?)がゴーグルをしてるイラストですw

パカッ!

全部出してみます。付属のRunCam Thumbカメラも同梱されています。
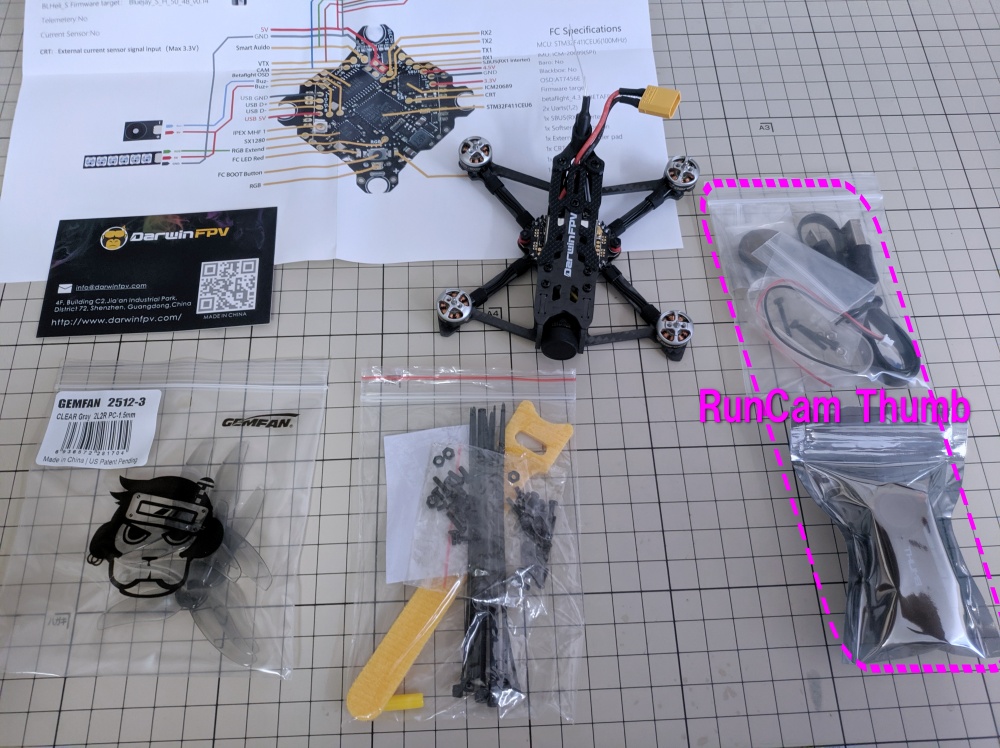
こちらは予備のネジ類とステッカー、その下はレシーバーアンテナ用のパイプ。インシュロックとバッテリーストラップがあります。
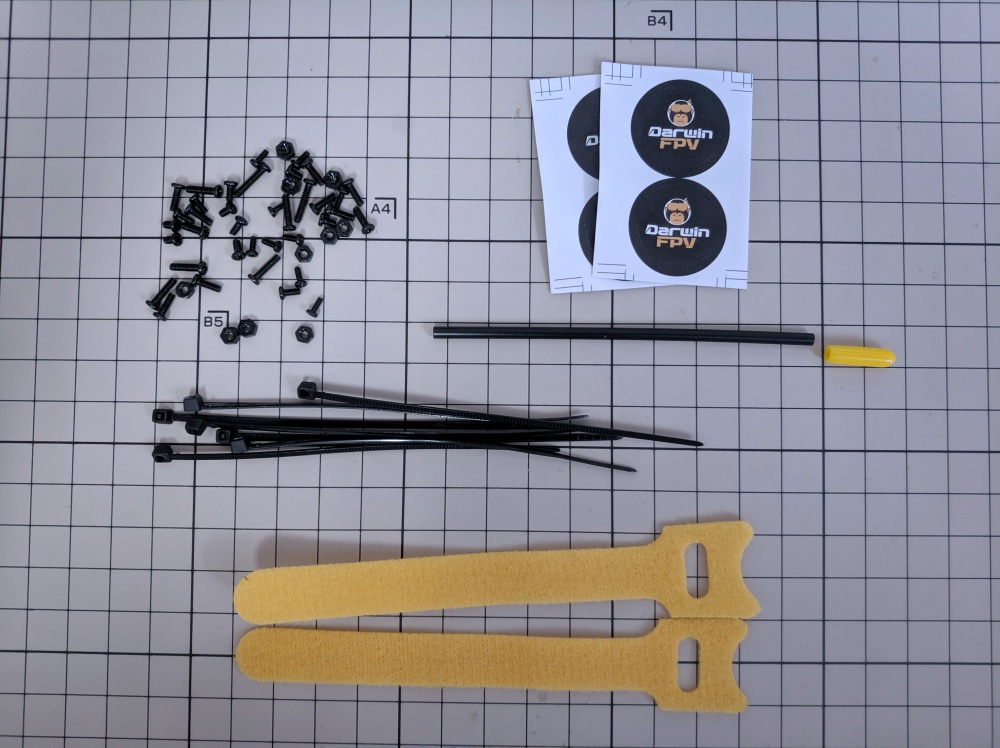
プロペラは2.5インチですので、2512サイズ3枚羽根が付属しています。機体にはプロペラは装着されていないので、この4枚が全てであり予備はありません。2512の12はプロペラのピッチですが、ピッチ1.2インチはかなり緩やかです。なおプロペラ固定用のボルトは付属していません。M2長さ6mmのボルトが8本必要です。

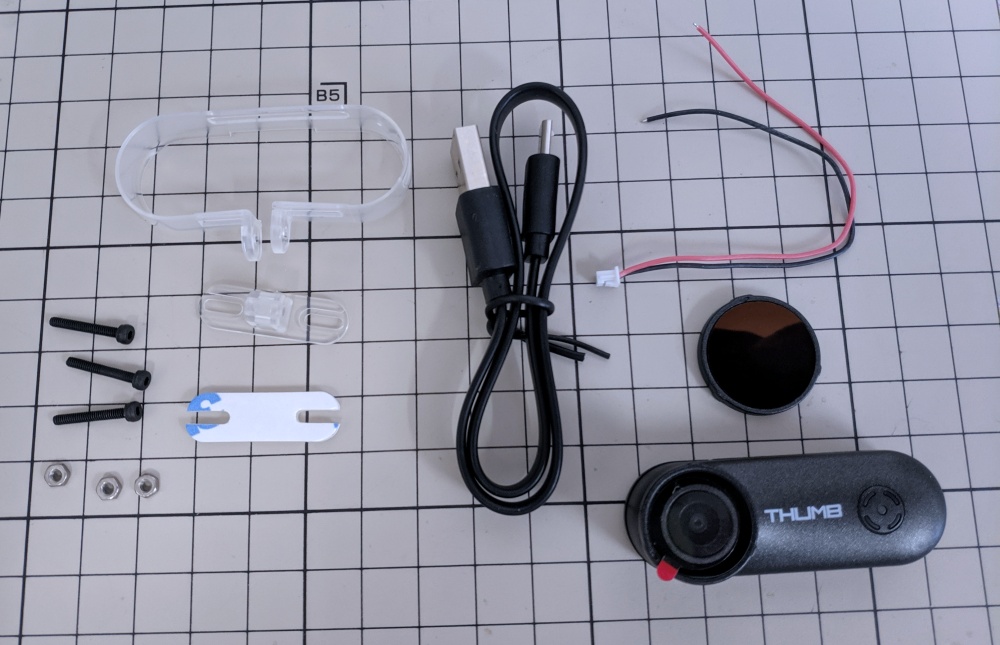
こちらは付属のRunCam Thumbカメラとその付属品です。
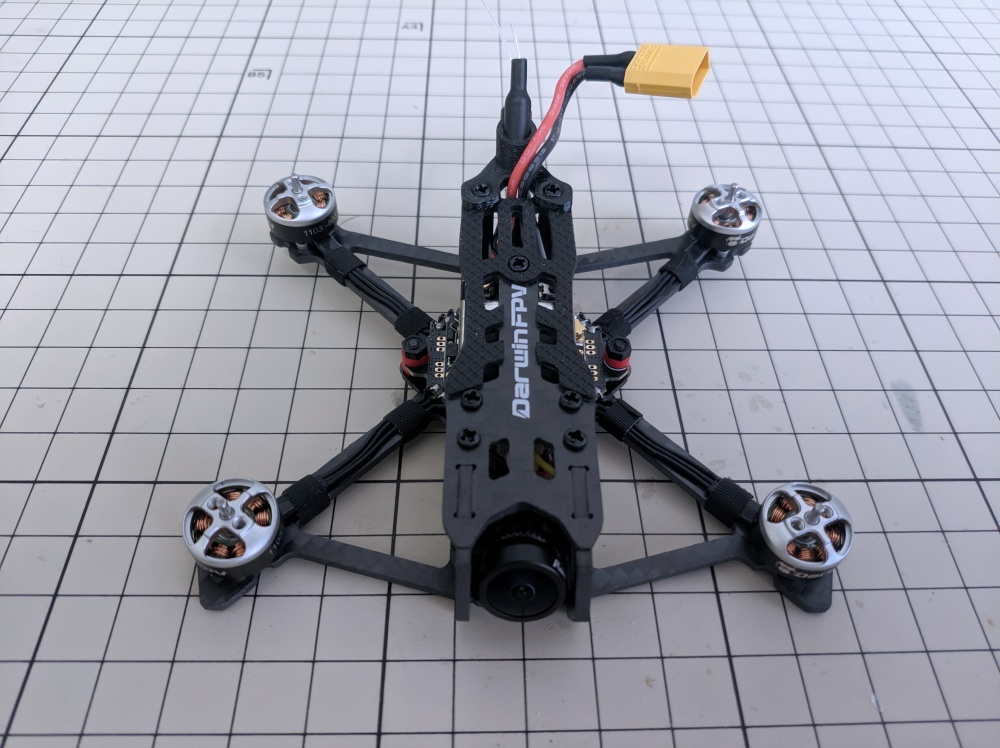
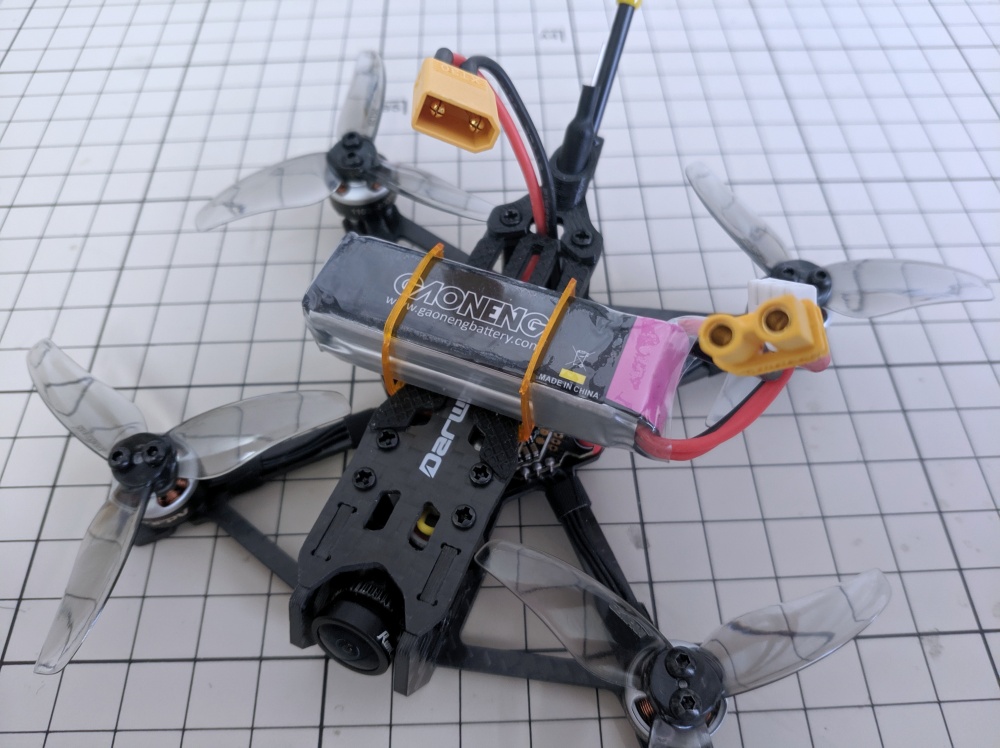
TinyAPE Freestyleの機体です。初めからバッテリーマットが貼り付けてありました。バッテリーコネクターはXT30になります。すこしケーブルが長めですね。
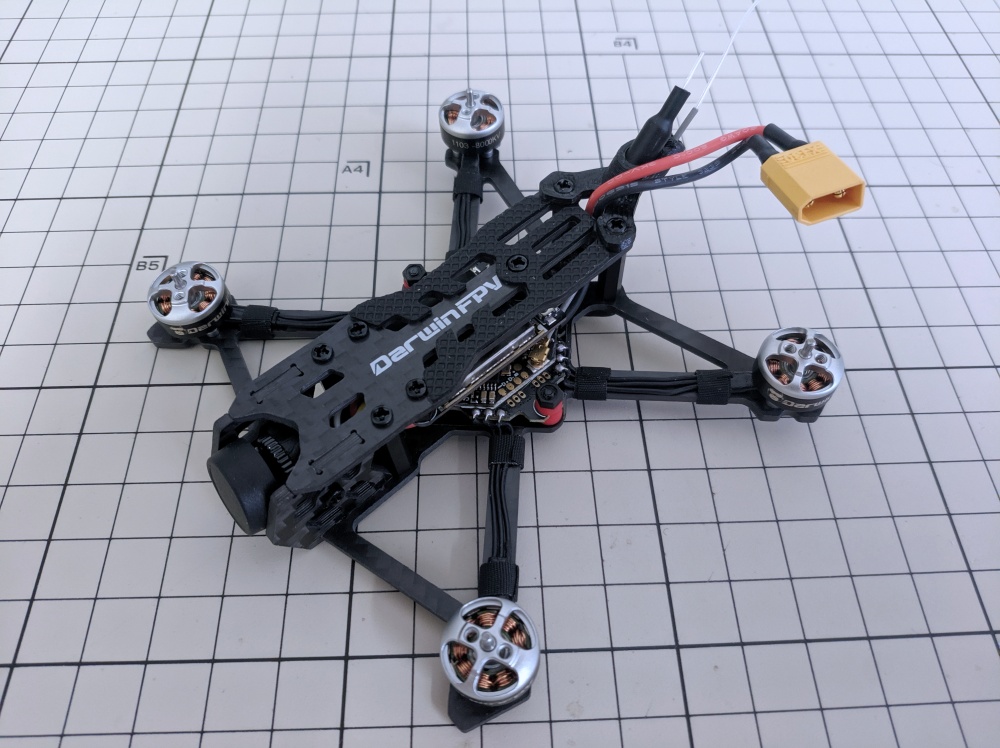
正面から見たところ。前後のアームに補強用のブレースが付いたようになっています。これでクラッシュ時のアーム折れが少しで避けれるのなら良いですよね。手でたわませてみると結構強度がありそうです。FPVカメラはサイドプレートで守られていますがすこーしレンズが出てます。
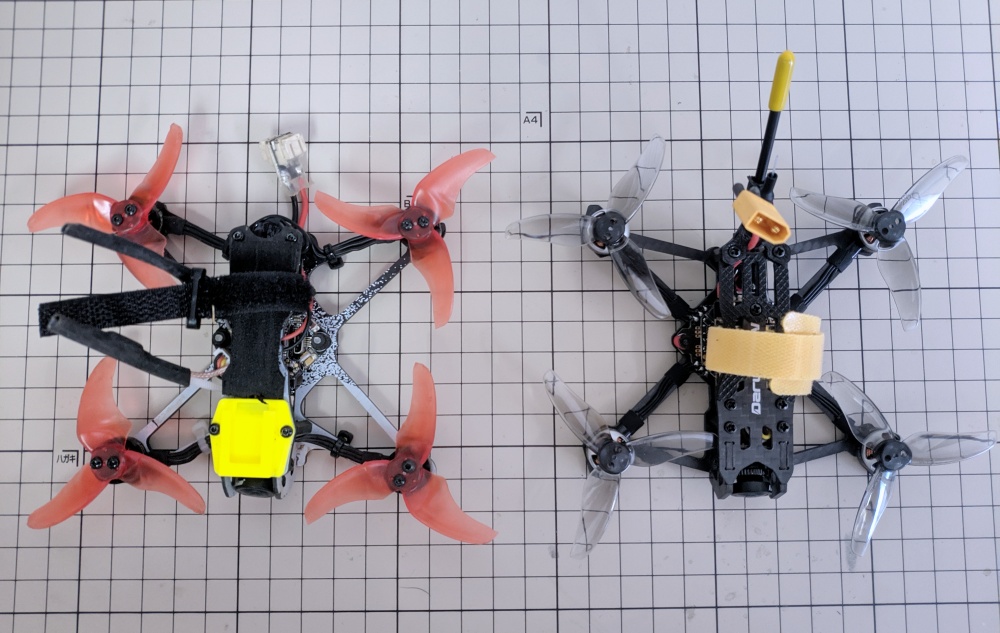
似たような機体である、EMAX Tinyhawk II Freestyle (リンク先はレビュー記事)と並べてみました。
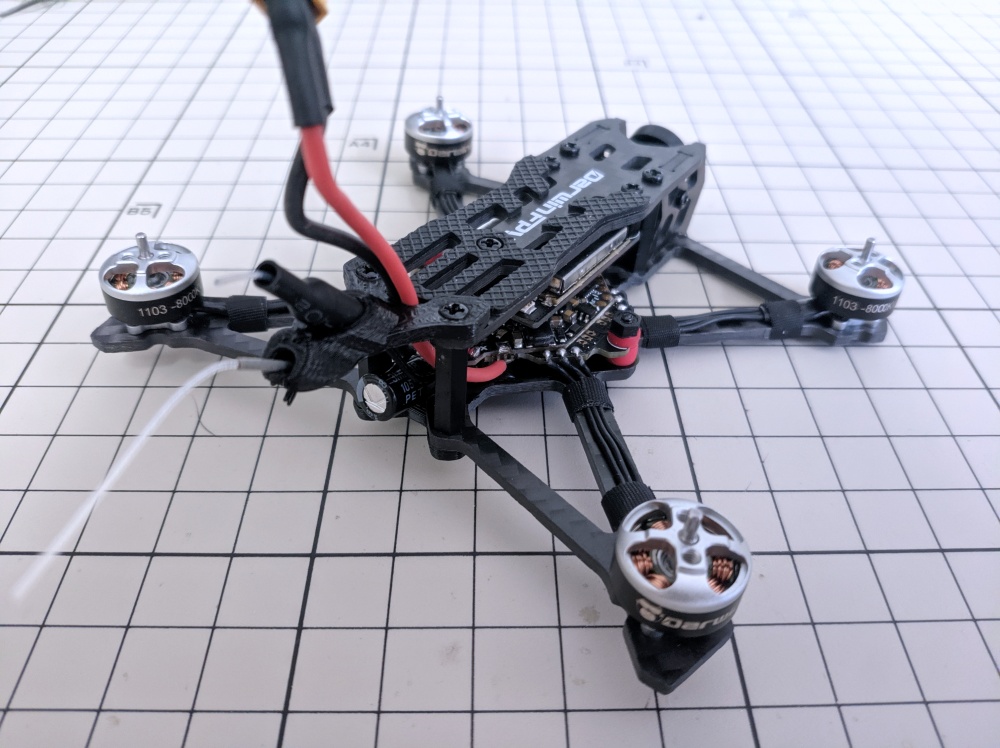
上から見たところ。アッパープレートにはDarwinFPVのロゴが印刷されています。WhoopタイプのAIO FCがかなりはみ出ていますね。モーターケーブルはアセトンテープでアームに固定されています。

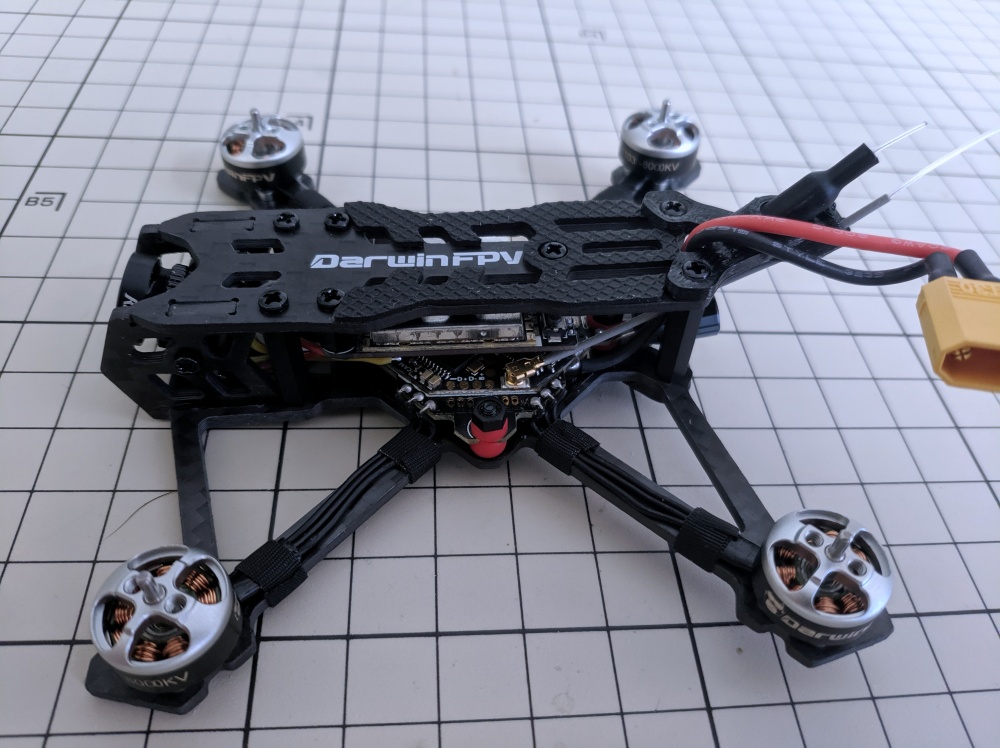
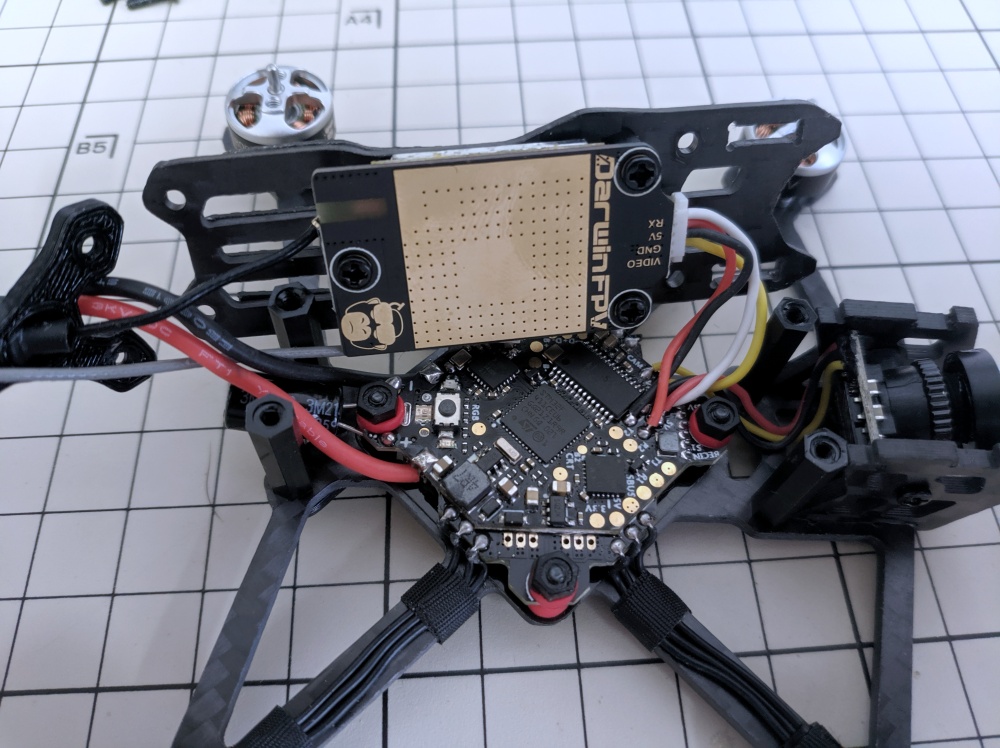
横から見たところ。FCは基盤を2枚重ねたようになっており、そこからExpressLRSレシーバーのアンテナが接続されています。小さい四角のセラミックアンテナではなく、通常のモノポールアンテナですのでそれなりにロングレンジに機体が持てそうです。2種類のアンテナは3Dプリントされたパーツで固定されています。
斜め後ろから見たところ。16V 220μfのコンデンサが搭載されています。レシーバーアンテナは付属のパイプで処理します。VTXアンテナはリーフアンテナではなくスリーブアンテナになります。
モーターはDarwinFPVの1103モーター 8000KVで2S仕様になります。
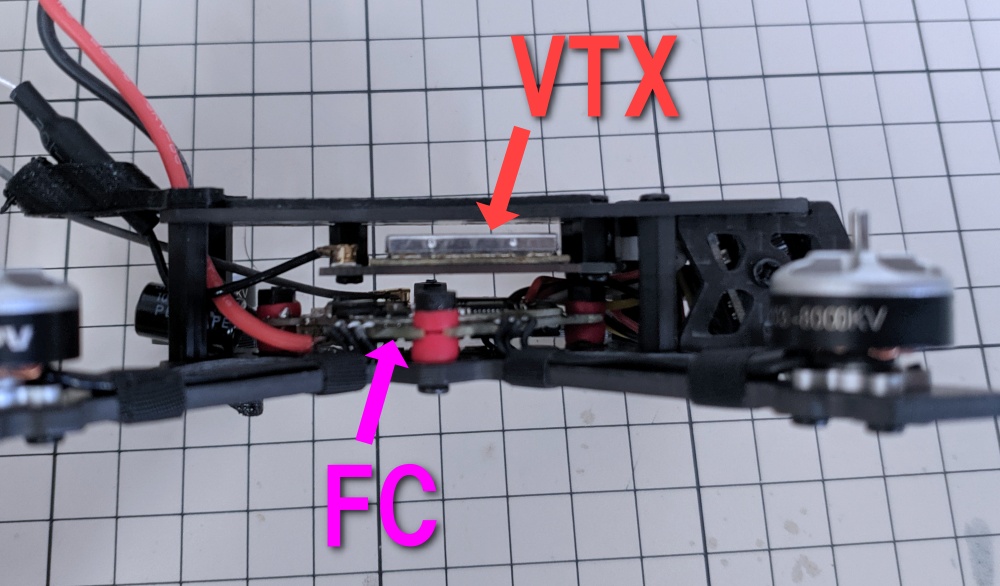
FCは機体の下部にゴムブッシュを介して固定され、VTXはアッパープレートに固定されています。
このアッパープレートとVTXの間にバッテリーストラップを通すので、場合によってはVTXを固定するネジにワッシャーをかまして隙間を広げる必要があるかもしれません。
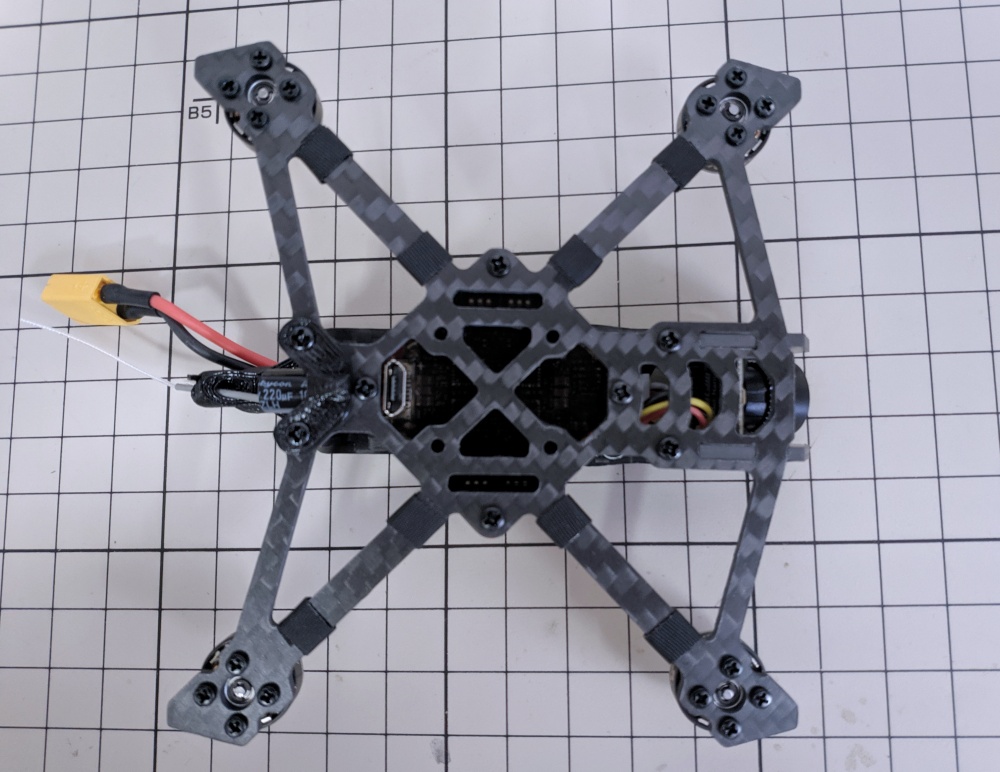
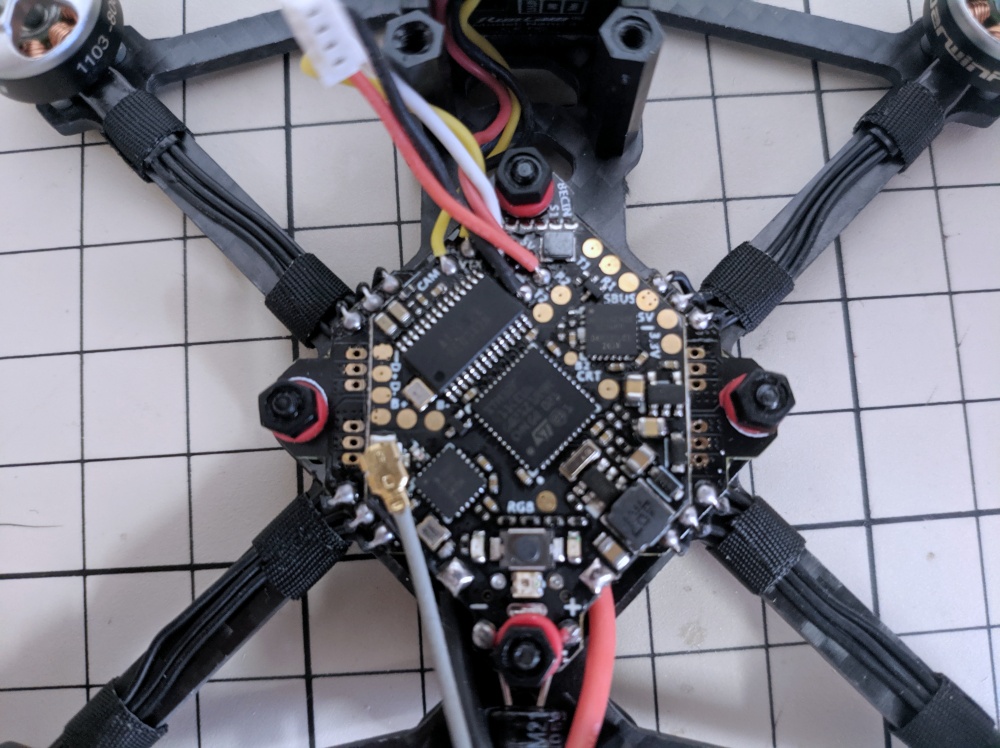
機体の裏側です。アーム、ロワープレートは一体型です。ご覧のように六角穴付きボルトではなくプラスネジが使用されています。
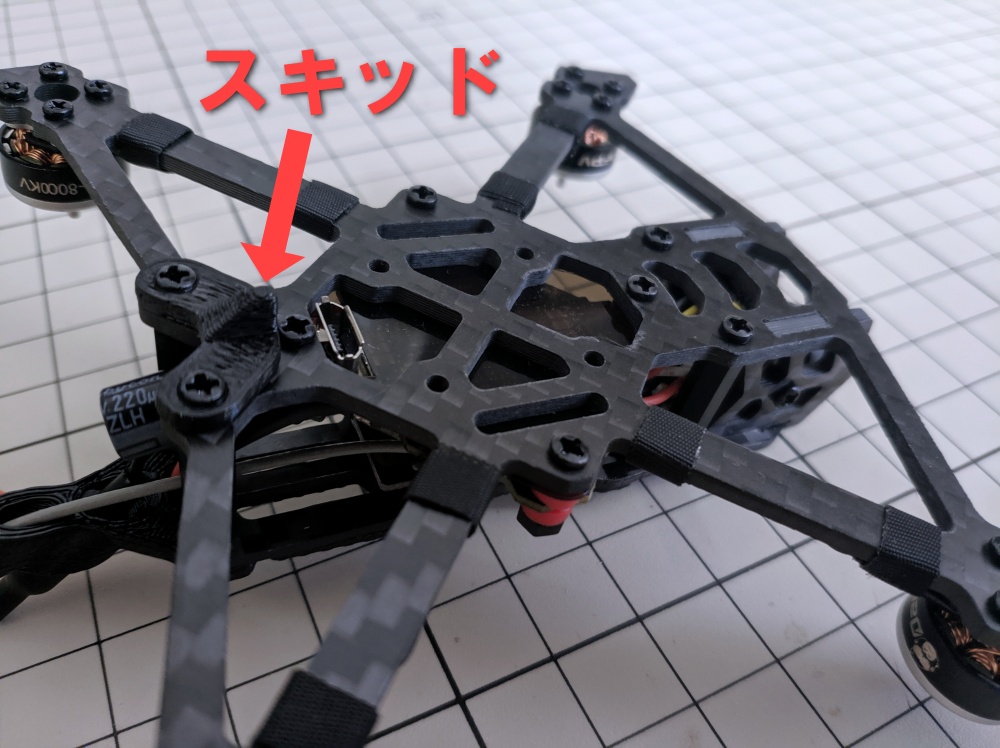
裏面の後部にはUSBコネクターを保護するために3Dプリンターで印刷されたおちんちn、いやスキッドが装着されています。またFCの裏面には保護シートが挿入されています。こういう心配りは好印象ですね。
全てプラスネジを使用してます。

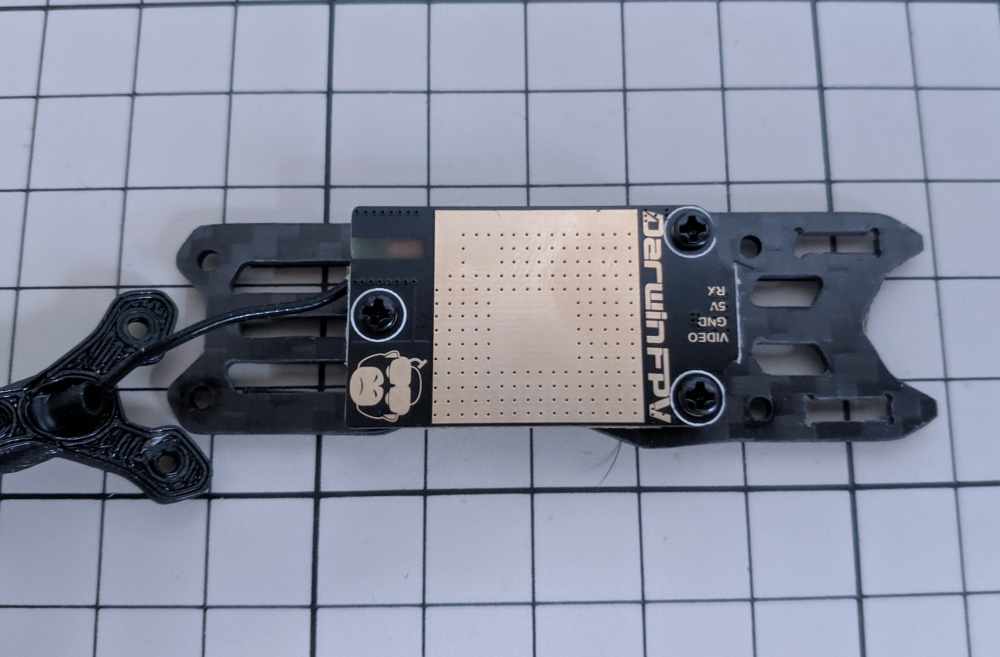
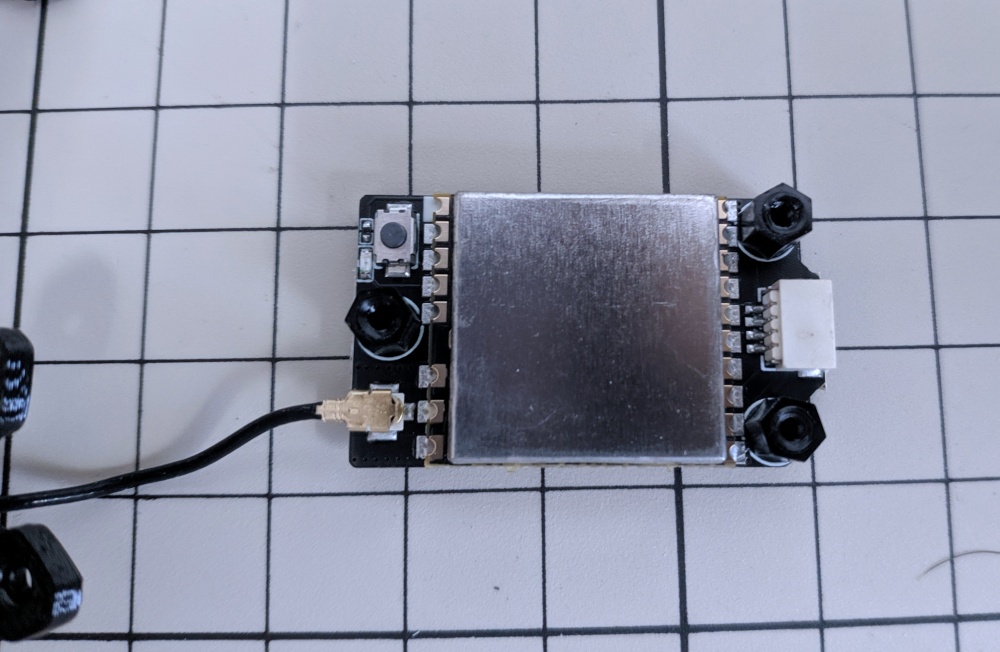
アッパープレートを外してみたところ。VTXはこのように搭載されています。なおアッパープレートはカメラのサイドプレートとの嵌合がきつくて剛性が高そうでした。
このFCの特徴は2枚重ねという事と、USBケーブルを延長できるようにはんだ端子がある事。どういうことかというと、FCの下側にUSBコネクターが出ていますが、それ以外に好きなところにケーブルを接続してコネクターを設置できるという事です。どうしても下側からアクセスできないフレームで使用する時に重宝します。また万が一下側に出ているUSBコネクターが破損してもケーブルを接続すると復旧できることにもなります。
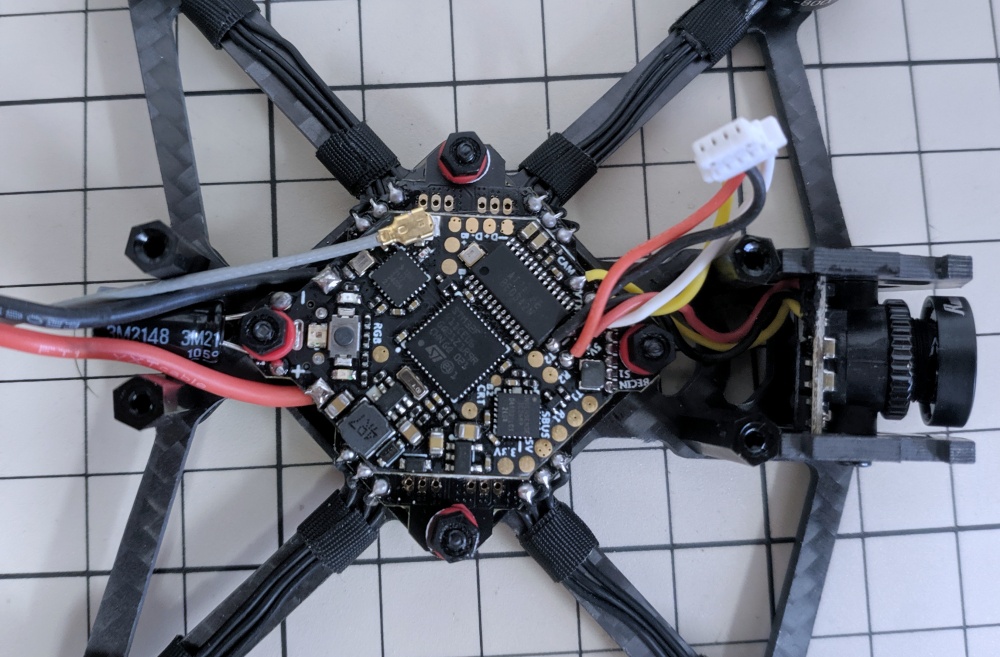
レシーバーがSPI接続で、VTXの制御はソフトシリアルを使用していますので、UARTが丸々2つ空いています。GPSも搭載できますね。
付属のFC配線図はこちら。(クリックでフルサイズ画像が開きます。)

こちらはアッパープレート側のVTX。DarwinFPV製のようです。
VTXの上側です。
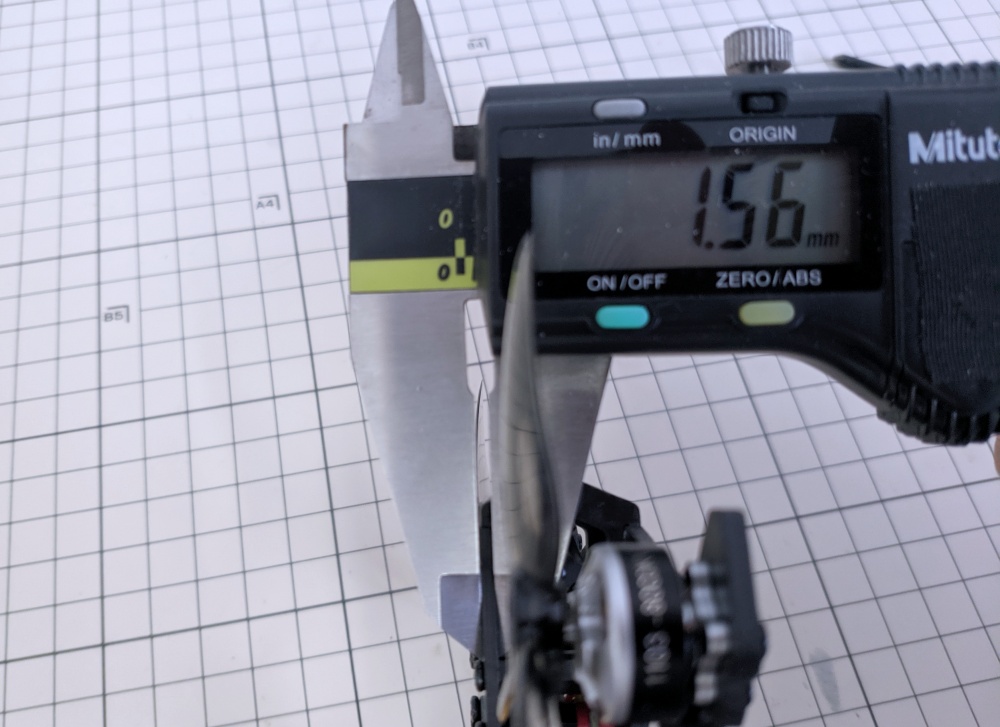
アームの厚さは2.1mm

アッパープレートは1.5mmです。
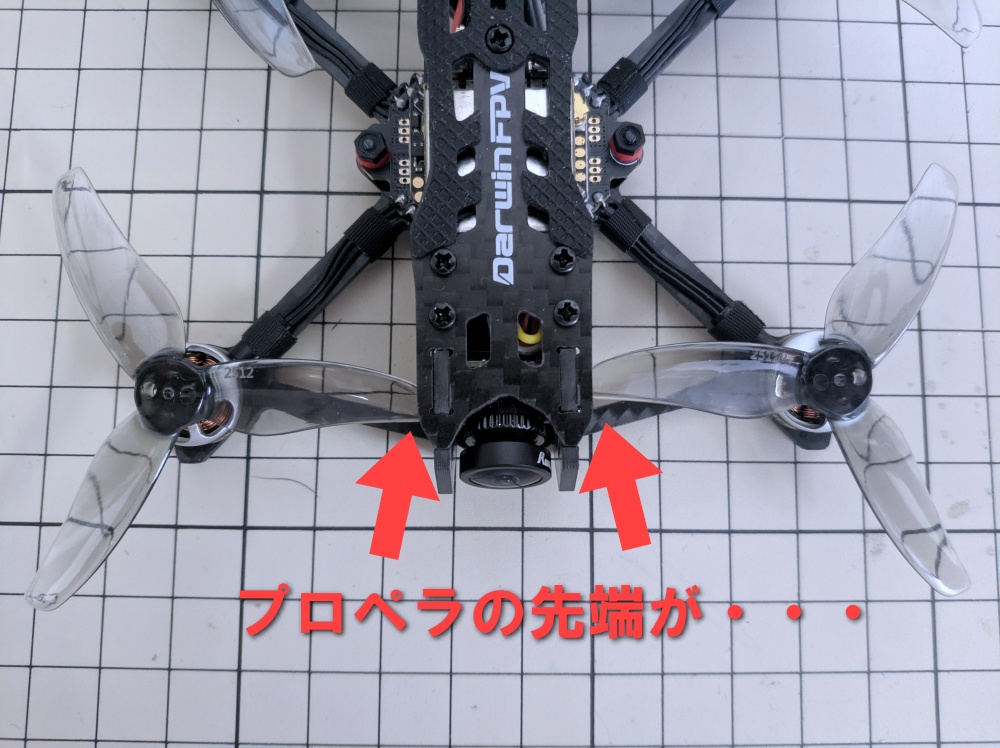
プロペラを付けるとカメラのサイドプレートギリギリです。

プロペラ先端がアッパープレートの下に潜り込んでいます。なのでプロペラはモーターの軸ににしっかりと奥まで挿しこむ必要があります。プロペラが浮いているとアッパープレートに当たる可能性があります。
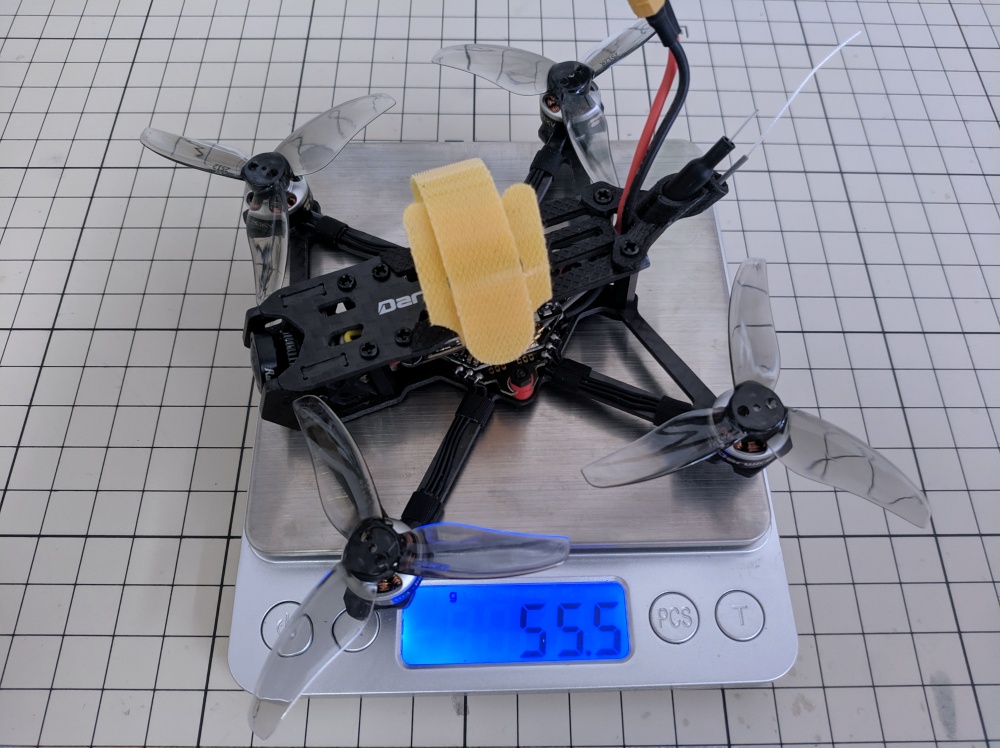
機体重量は55.5g
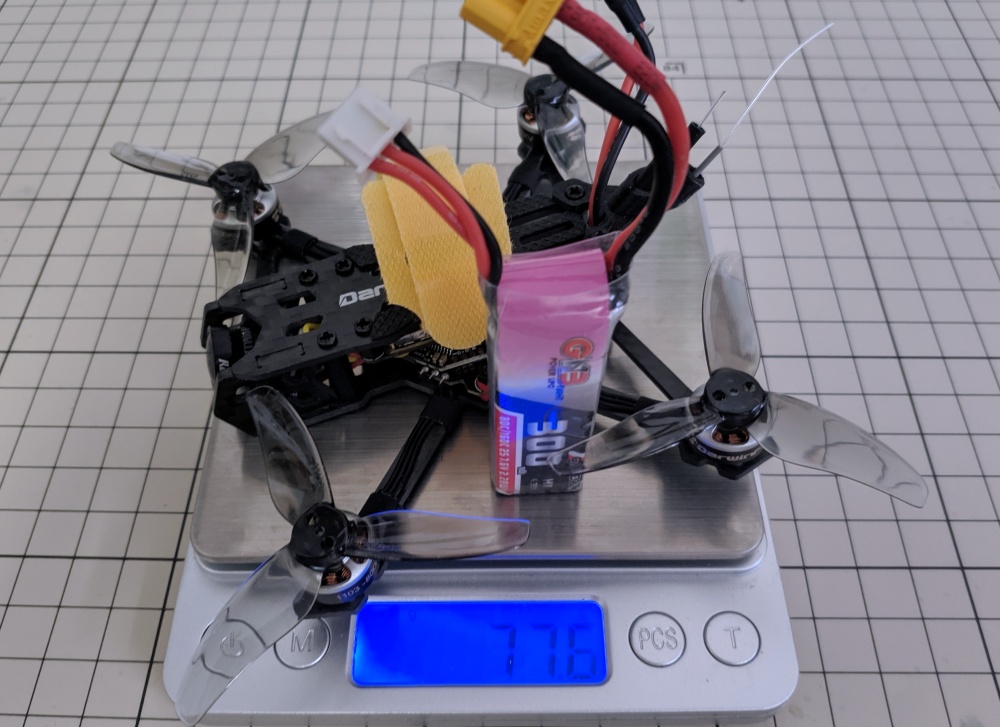
2S 300mAhのリポバッテリー込みで77.6g
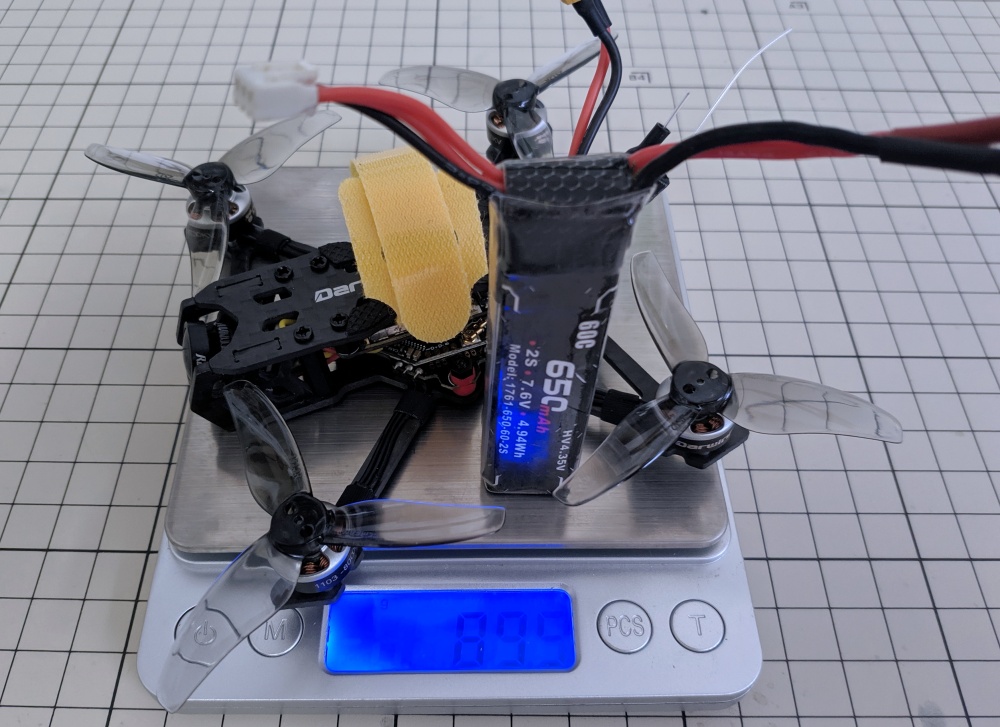
2S HV 650mAh バッテリー込みで89.5g
RunCam Thumbカメラは初期のロットより付属のNDフィルターの径が大きくなっていました。

径が大きくなっても内径は同じです・・・
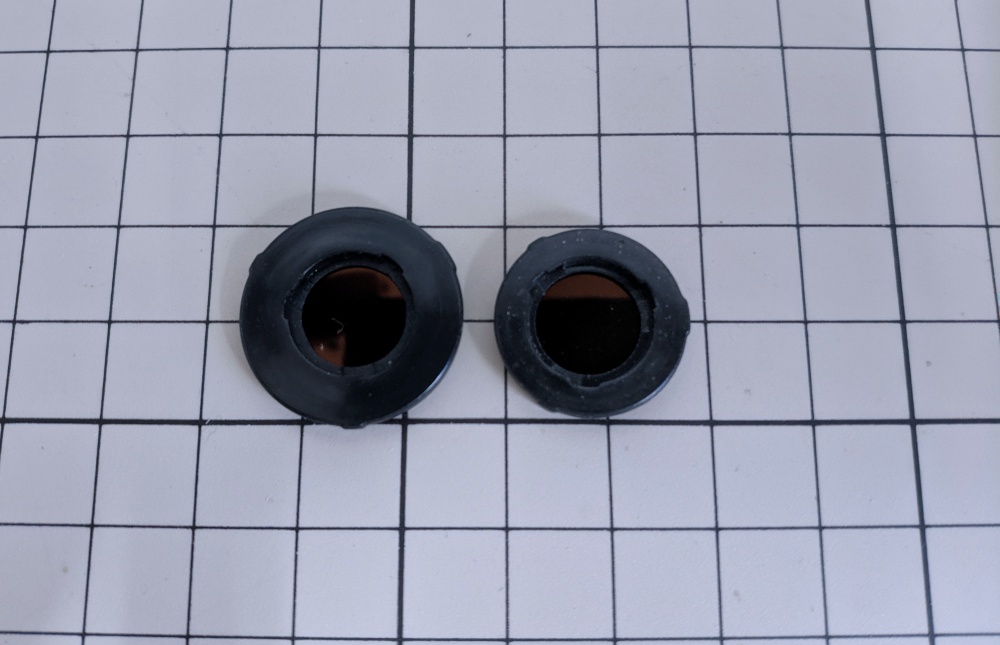
初期バージョン(上)と比べたところ。なんか、カッコ悪いぞ…

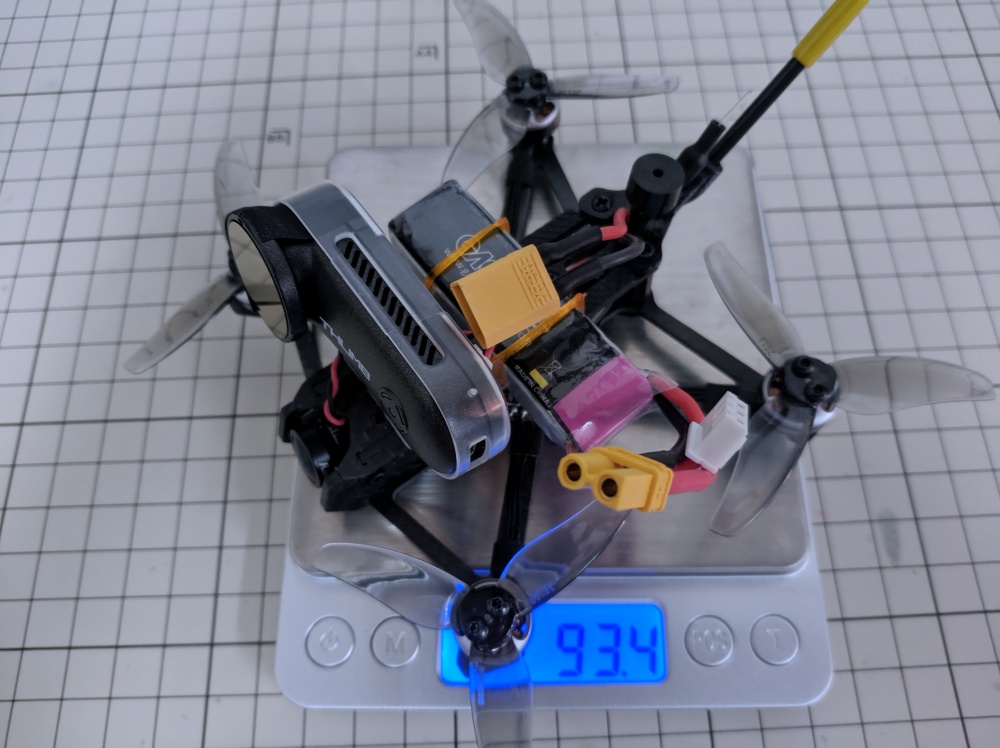
RunCam Thumbカメラを搭載すると、バッテリーは横向きにしか搭載できません。そこで3Dプリンターで柔らかい素材であるTPUを使用して簡単なバッテリーホルダーを印刷しました。
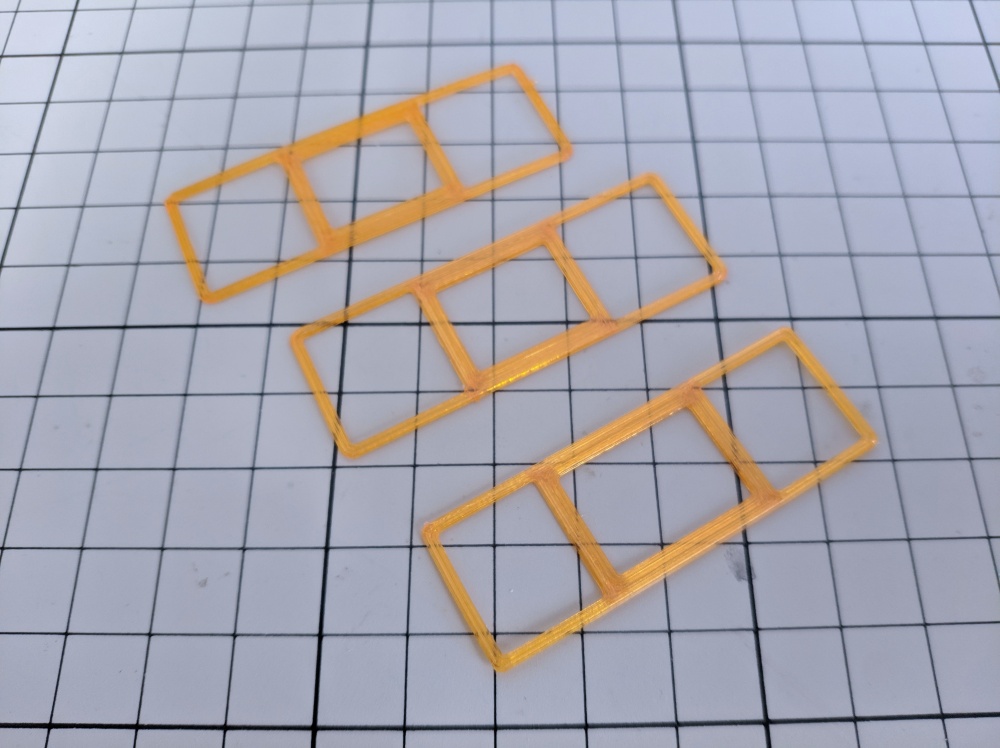
このバッテリーホルダーはこうやって使います。(いま気が付いた!輪ゴムでいいんじゃない?)
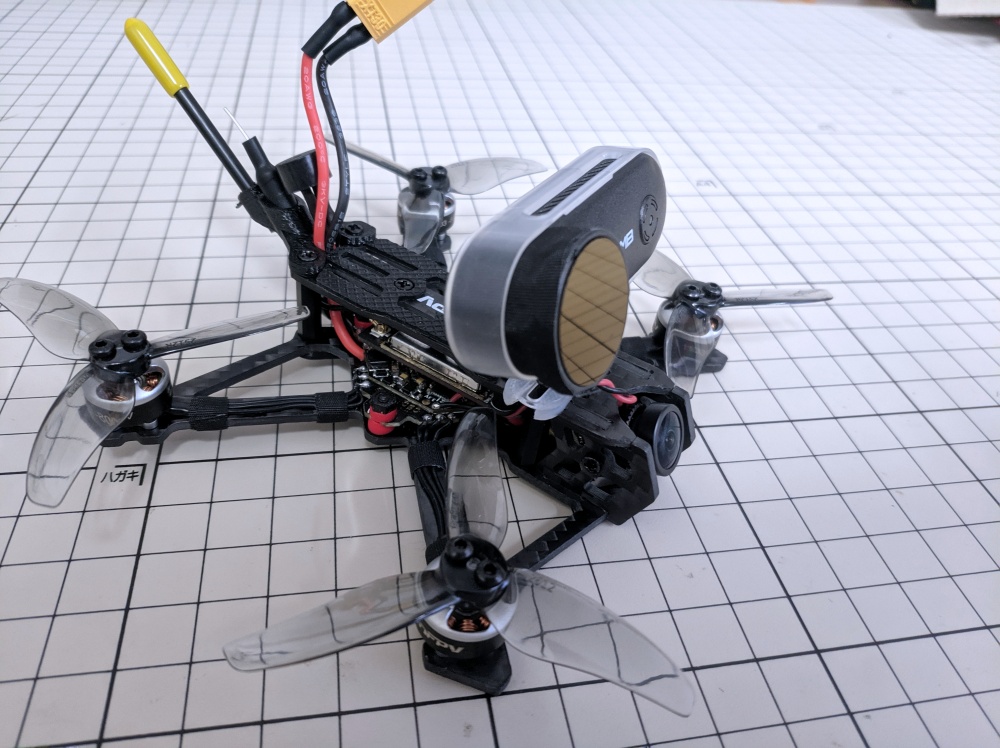
RunCam Thumbカメラを付属のマウントで搭載したところ。300mAhバッテリーで93.4g
ブザーとRunCam Thumbカメラ用の電源ケーブルを搭載しています。
RunCam ThumbカメラのNDフィルターは固定が緩いのでアセテートテープで外れないようにしています。また裏側のマイクロSDカードスロットのフタも外れないようにテープで固定しました。
設定確認
ここでは初期設定を確認していきます。実際のフライトの設定は次回「フライト編」で行っていきます。
FCに内蔵されたSPI接続のExpressLRSレシーバーはBetaflight4.3以降で対応しています。したがってTinyAPE FreestyleもBetaflight4.3が搭載されています。
ターゲット名は、BETAFPVF4SX1280

ポートはUART1とUART2が未使用です。SPI接続のレシーバーですのでUARTは使用しません。またVTXのチャンネル・パワー変更はソフトシリアルを使用するように設定してあります。

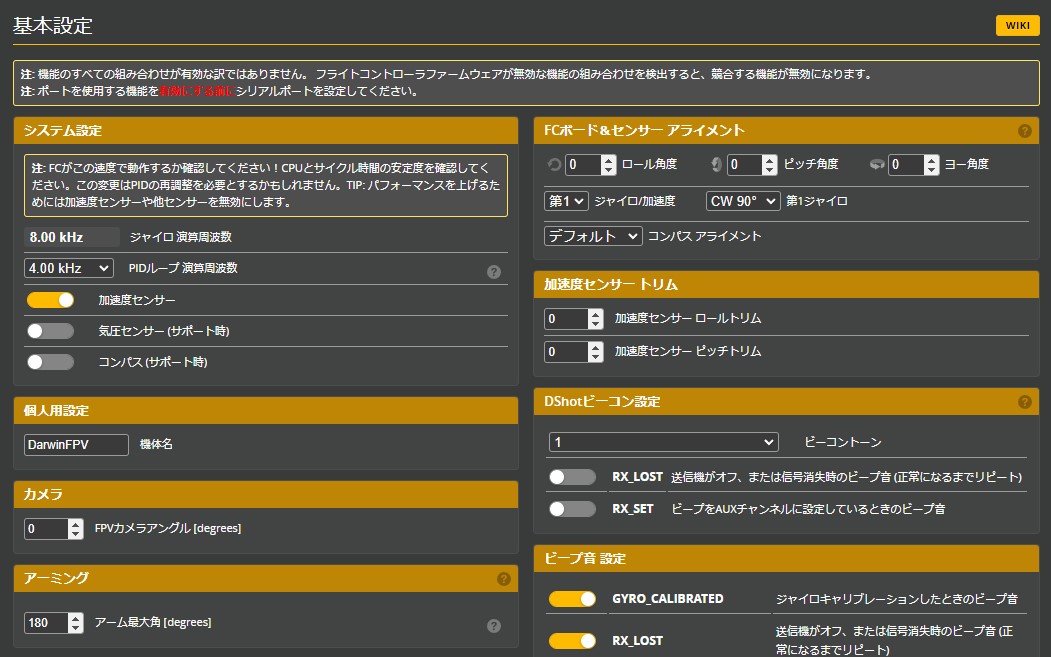
基本設定。PIDループ周波数はF411ですので4KHzが設定されています。機体名、アーム最大角度も設定済みです。
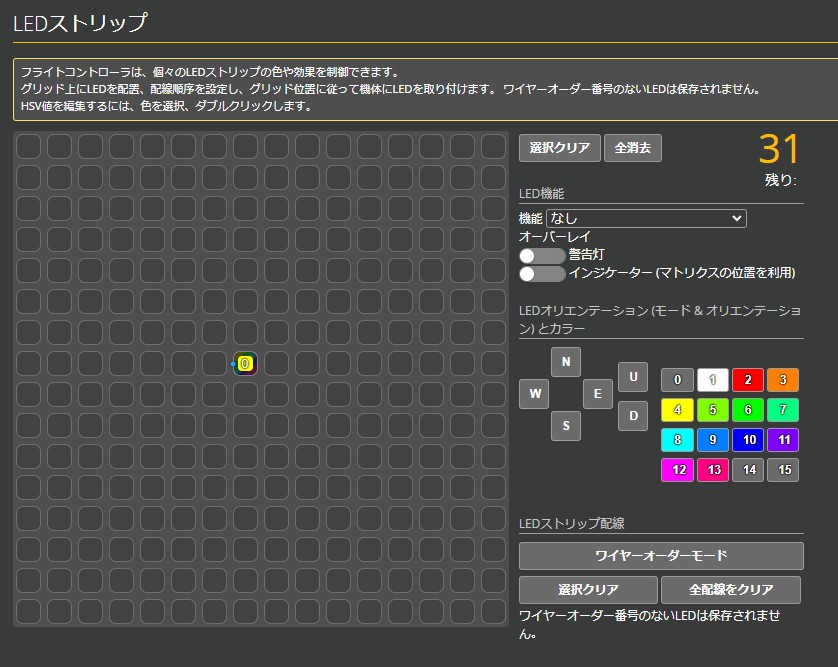
その他の機能。FCの後部にLEDが一つだけ搭載されていますのでLED_STRIPがONになっています。
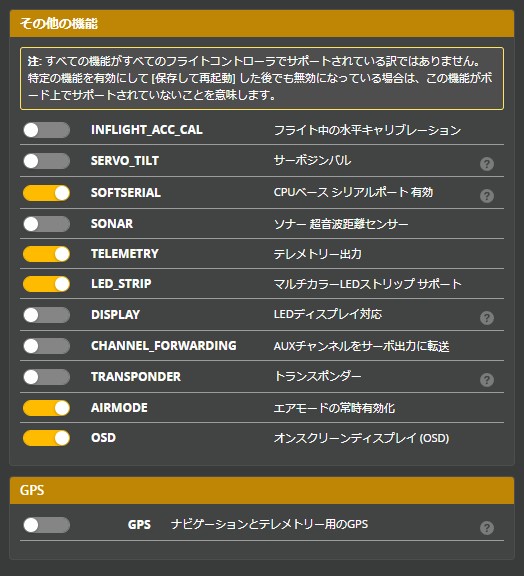
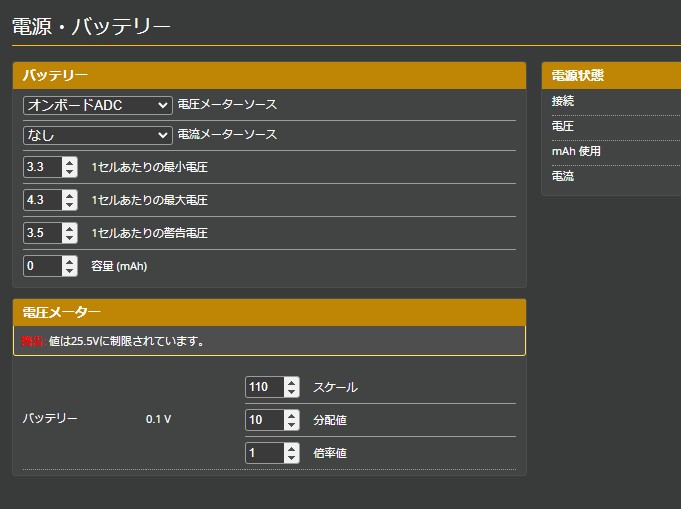
電流計は搭載されていませんので「なし」になっています。
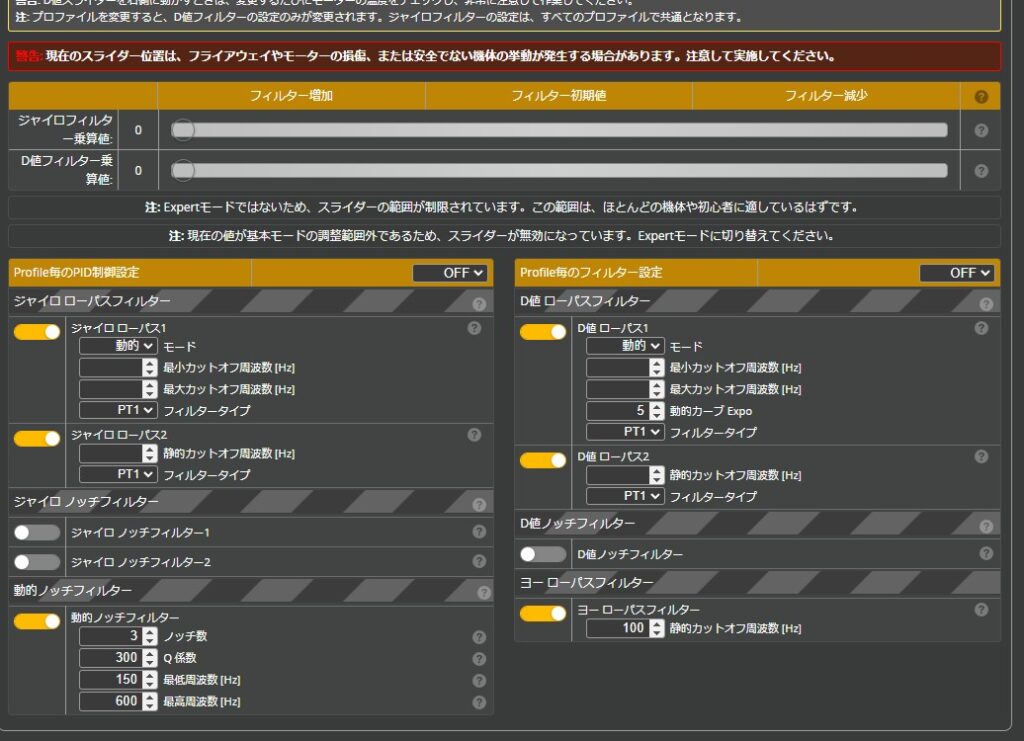
PIDチューニングでは数値が直接設定されていますので、スライダーがOFFになっています。スライダーを使用する時はスライダーのすぐ上のモードOFFをRPYに変更すると使用できます。

フィルター設定。RPMフィルターはデフォルトでONになっていませんので、ONにした後にプリセットからフィルター設定を適用します。
受信機。SPI受信機でEXPRESSLRSが選択されています。

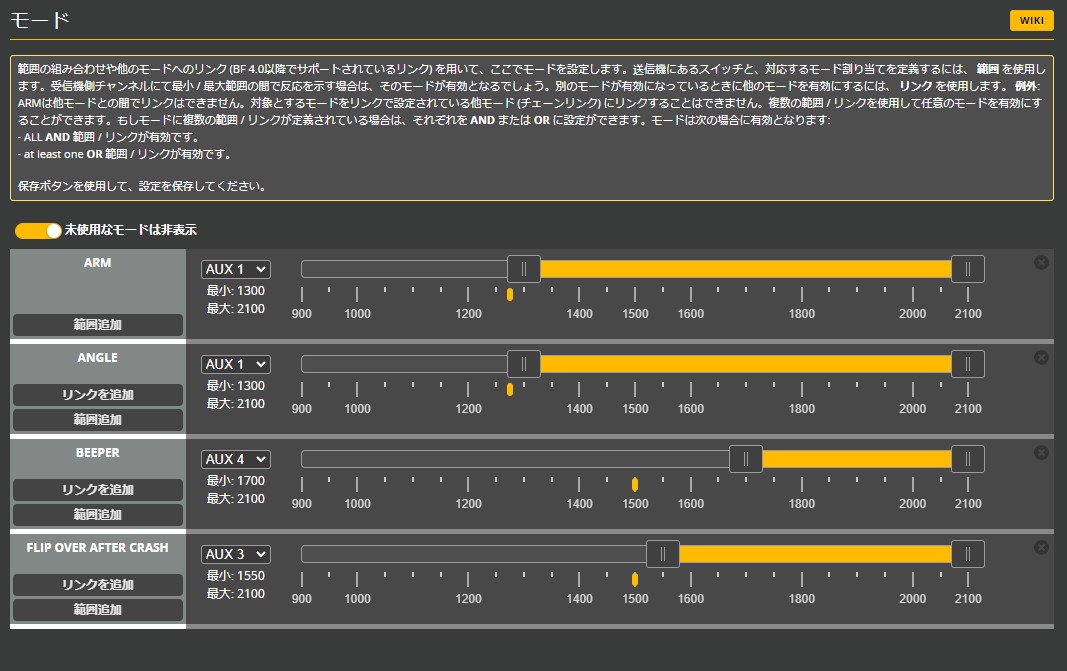
モード設定。普段使う設定に変更しましょう。
なぜか初期設定ではアームすると必ずANGLEが有効になる設定になってます。絶対にFreestyleやらせない気満々ですねw
モータータブではDSHOT300が設定されています。
Betaflight4.3では、F411のFCはPIDループ周波数4KHzとDSHOT300はペアです。さらにCPUのオーバークロックも必要です。しかしオーバークロックはしてありませんでしたので、CLIで下記のコマンドを入力して設定してください。
set cpu_overclock = 120MHZ
save双方向DShotは有効になっていませんので、RPMフィルターを使用するには有効にします。

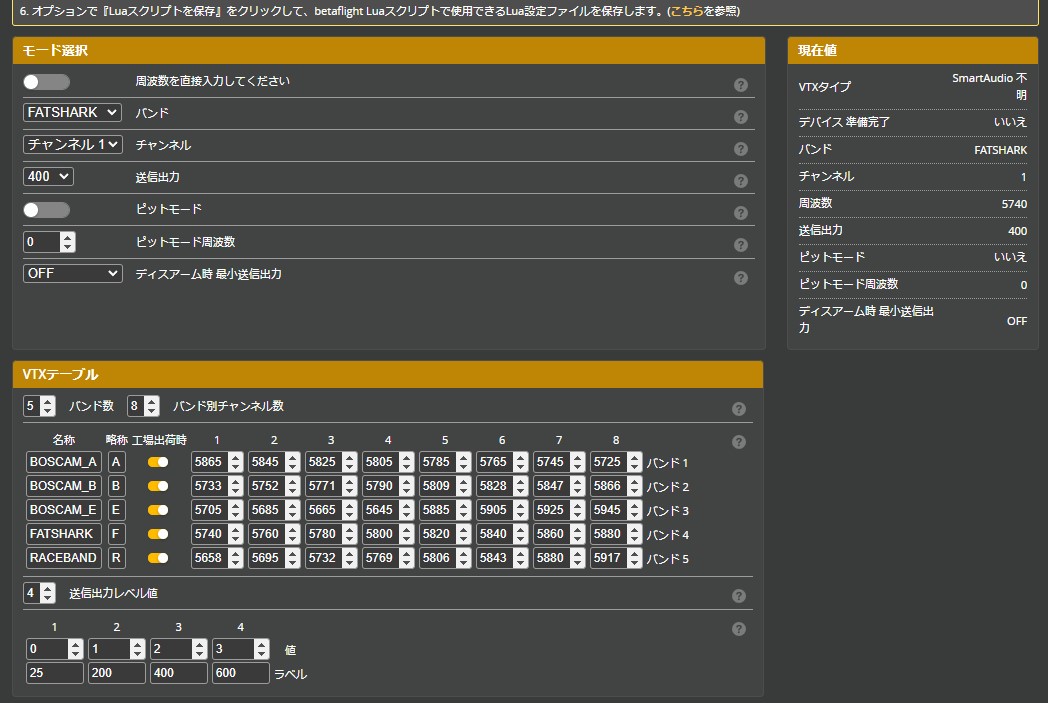
VTXはテーブルが設定済み。送信出力は25、200、400、600mwと4段階です。
FCの後部に1個だけ小さなLEDを搭載しているので、ここで設定できます。
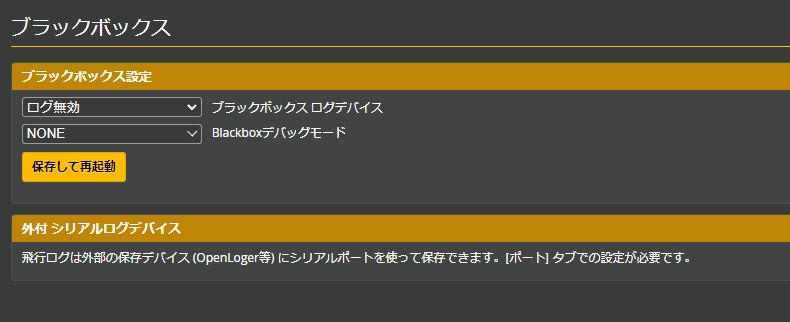
ブラックボックスは搭載されていませんので「ログ無効」にして余分な負荷を減らしておきましょう。
初期状態のCLIダンプはこちらになります。「名前を付けてリンク先を保存」してください。
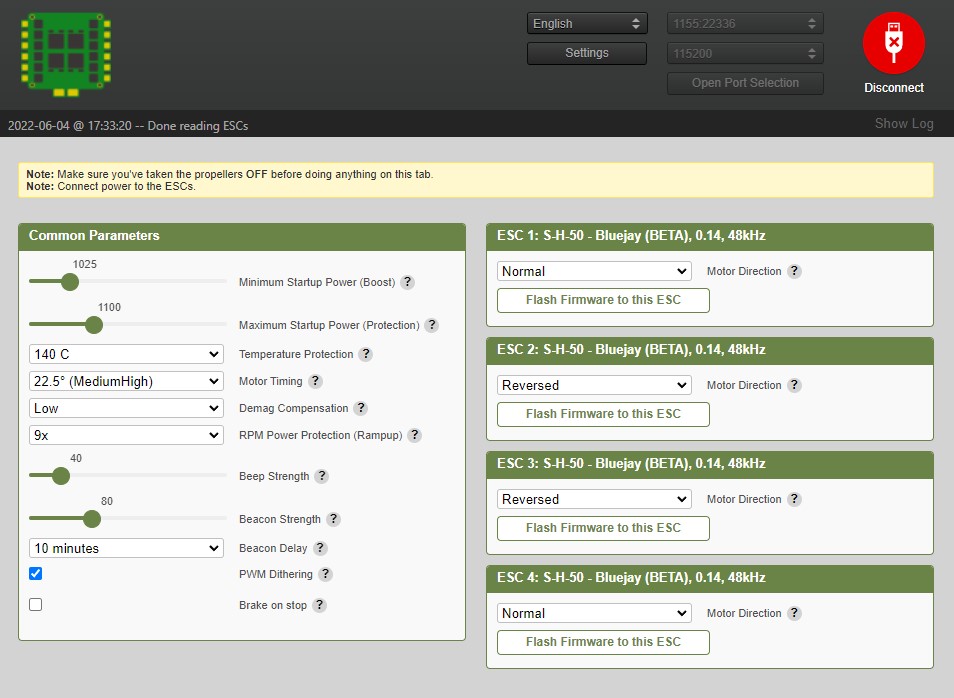
ESCはBluejayファームウェアがフラッシュ済みです。
まとめ
DarwinFPVの製品は格安なのが多くて、「安かろう悪かろう」のイメージが少しはあったのですが、あちこちに手が加えられており少しでも良くしようとする姿勢を強く感じました。
実際に、USBコネクターやFCの保護シートや、フレームの組み立て精度、設定に置いてもBluejay 48KHzが導入済みであったり、出来るだけ実運用に近い状態に使用としているのが分かります。FCも内蔵SPI接続ExpressLRSを導入してきたのも意気込みを感じますね。
今回はRunCam Thumbカメラ付なのでFHD動画も楽しみです。
次回「フライト編」をお楽しみに。

