

100g未満のフリースタイル機、DarwinFPV TinyAPE Freestyle どんな飛行性能なのか?
レビュー【フライト編】では、フライトに向けての準備と実際のフライト映像を掲載します。
DarwinFPV TinyAPE Freestyle のスペックや機体の詳細は前回の【UNBOX編】で掲載しています。

DarwinFP TinyAPE Freestyleは、Banggoodでお求めになれます。

フライト用に設定
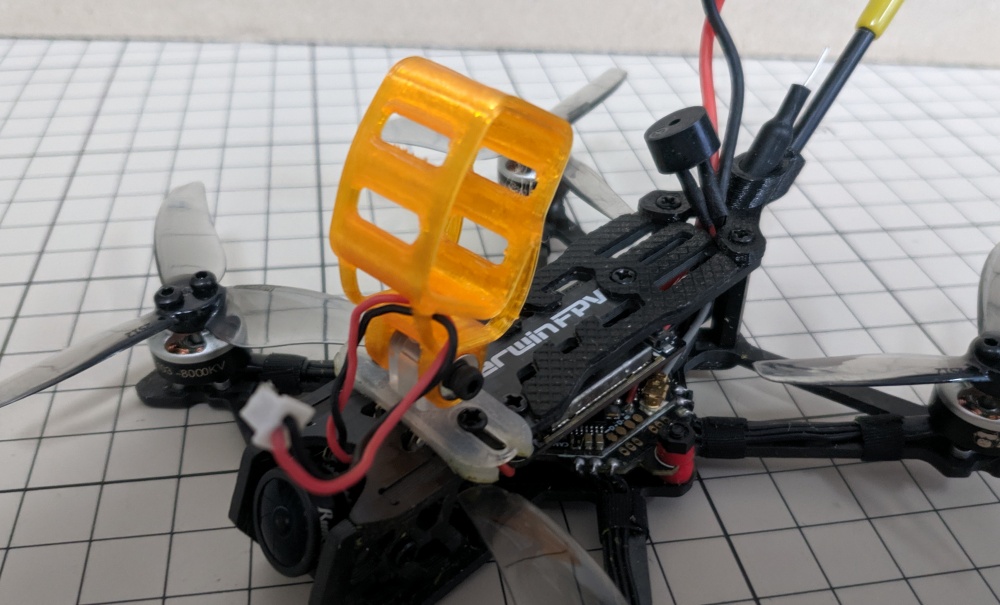
前回の【UNBOX編】ではブザーを取り付け、バッテリーを横向きに搭載できるようにしました。
続いて内蔵SPIレシーバーと送信機のバインドを行います。
レシーバーのバインド
TinyAPEは内蔵SPIレシーバーがExpressLRSです。ExpressLRSはバインディングフレーズを設定することで、電源ONですぐバインドしてくれて大変便利です。
ExpressLRSの設定は専用のExpressLRS Configuratorで行いますが、内蔵SPIレシーバの場合はちょっと違います。
内蔵SPIレシーバーの制御プログラムはBetaflightと統合されていて、ExpressLRS単独で設定したり更新したりすることが出来ません。
そのためバインディングフレーズを設定するにはBetaflightから行います。
まず初めに、送信機で使用しているバインディングフレーズをBetaflightに書き込めれる形式に変換します。以下のExpressLRSのサイトを開き、UID Byte Generatorを使用します。

UID Byte Generator のBinding Phrase に送信機で使用しているバインディングフレーズを入力します。(数字と英字、英字は大文字小文字を区別します。)

バインディングフレーズを入力するとUID欄に数字の羅列が表示されます。これがUIDで、Betaflightに設定すると内蔵SPIレシーバーがバインドしてくれます。下段のBetaflightのCLIコマンドをコピーしておきます。
設定方法は、BetaflightのCLIタブを開き、表示されたCLIコマンドを貼り付けてEnterキーを押します。
これで完了です。次回から自動でバインドしてくれます。
内蔵SPIレシーバーはBetaflightと一体になっていますので、Betaflightを更新した時は忘れずexpresslrs_uidも設定しましょう。通常は更新前の、diff allを読み込ませればOK。
Betaflightの設定
続いてBetaflightの設定です。主に以下の設定を行います。
- モード設定
- RPMフィルターを使用する
- PID設定のスライドバーの有効化とダイナミックアイドルの設定
- プリセットからフィルターとRCスムージングを設定する
- CPUのオーバークロックをする
なおDarwinFPV TinyAPE FreestyleはBetaflight4.3が導入済みですので、Betaflight Configuratorも4.3に対応した最新のバージョンを使用します。(下記ダウンロードサイト)

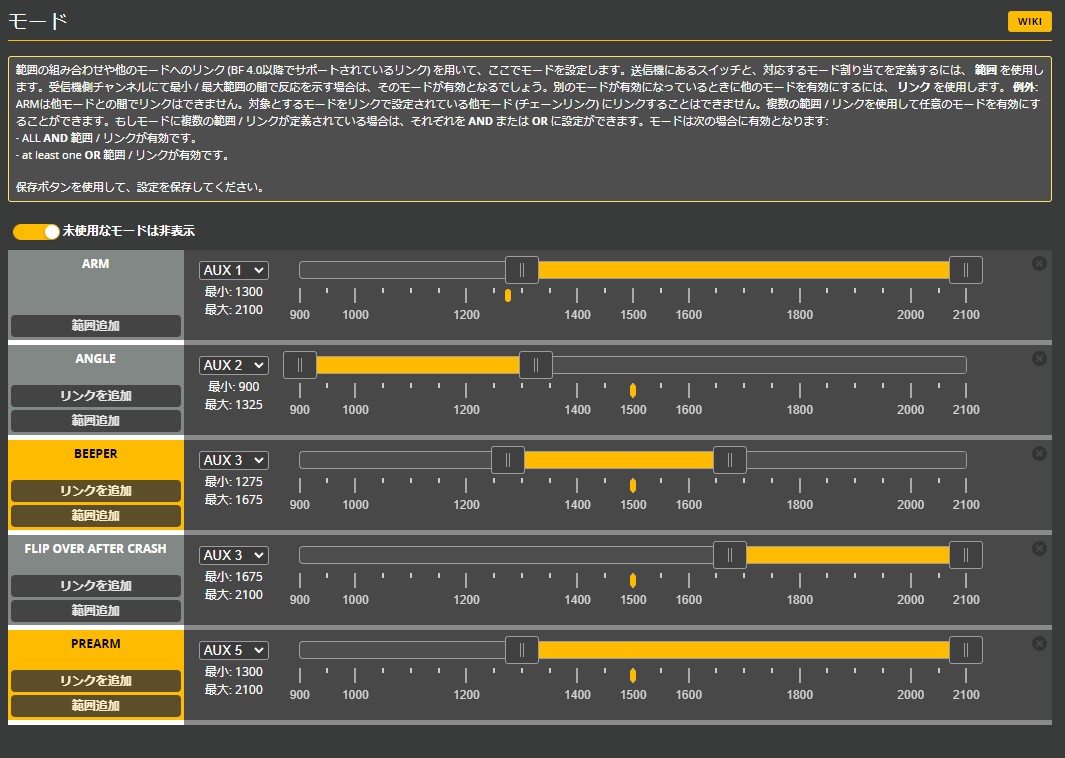
1、モード設定
デフォルトではアームするとアングルモードしか使用できない「変な設定」になっていますので、普段使用する設定に変更します。
レシーバーがExpressLRSですので、アームはAUX1になります。
また不用意にアームスイッチに触れてしまい突然プロペラが回り出すと危険なので、プレアームも設定します。下図ではPREARMにAUX5が割り当ててあり、送信機のAUX5はモーメンタリスイッチ(押している時だけONになり、指を離すとOFFになるスイッチの事)が割り当ててあります。このスイッチを押しながらアームスイッチを入れないとアーム出来ません。
2、RPMフィルターを使用する
RPMフィルターはモーターからのノイズがジャイロに入らないようにしてくれる優れものです。これを使用しない理由が見当たらないほど有用な機能ですのでぜひ使用しましょう。
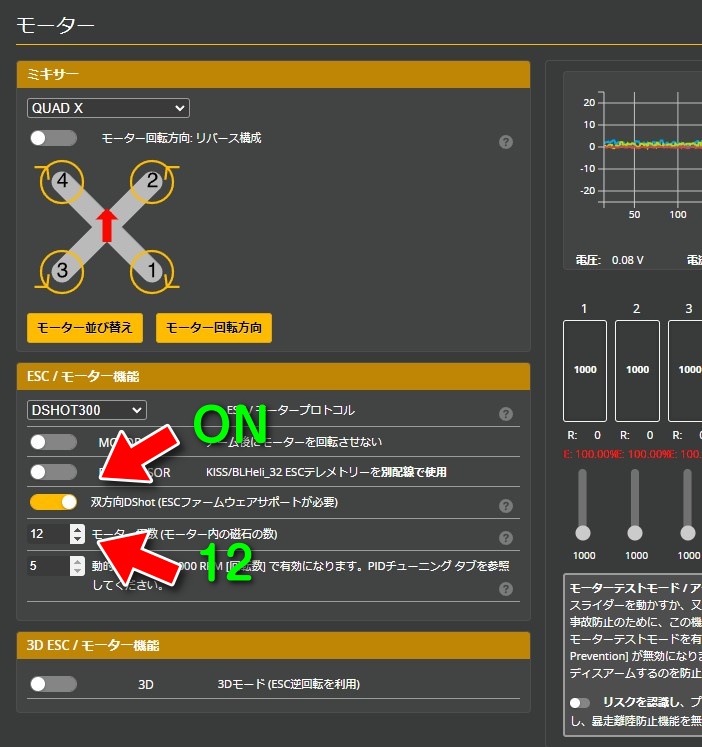
DarwinFPV TinyAPE FreestyleはESCファームウェアにBluejayをフラッシュ済みですので、RPMフィルターを使用するのは簡単です。
Configuratorのモータータブへ移動し双方向DShotをONにします。
モーター極数に12を入れます。
保存して再起動して完了です。
3、PID設定のスライドバーの有効化とダイナミックアイドルの設定
Betaflight4.3では今までよりさらに簡単にPID設定ができるスライダーがありますのでこれを有効にします。下図のようにモードの所をOFFからRPYに変更します。これで基本的なスライダー3種類が使用できるようになります。
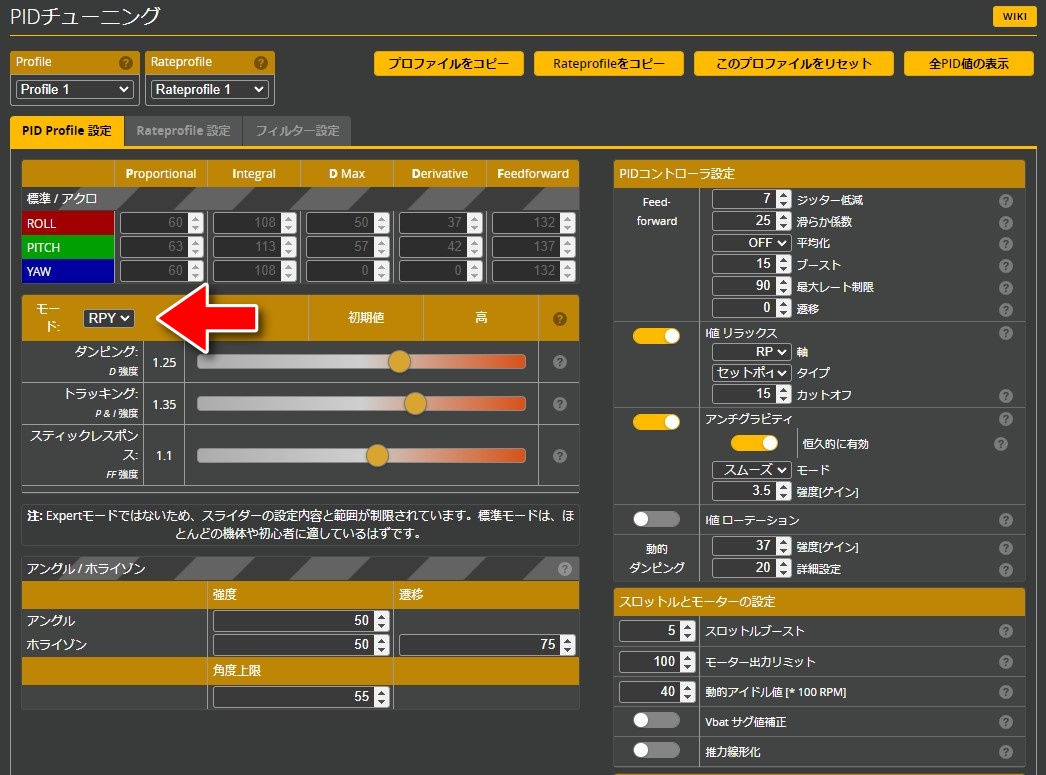
PID設定はダンピングとトラッキングの両方を同じように上げていきます。20秒ほど飛行させ、振動が出たりモーターが熱くなっていないか確かめながら、これを繰り返してあげていきます。振動が出たりモーターが熱くなっていた場合は、一つ戻します。スティックレスポンスは送信機のスティックを早く動かした時に、動かした直後に一時的に設定したレート以上の反応が得られます。これは実際に試してご自身のフライトスタイルにあった設定を探してみるといいでしょう。
Betaflight4.3ではダイナミックアイドルの設定も簡単です。上図右下の動的アイドル値にRPMを入力します。TinyAPEのモーターでは4000RPMを最小回転数として設定します。動的アイドル値に40と入力します。
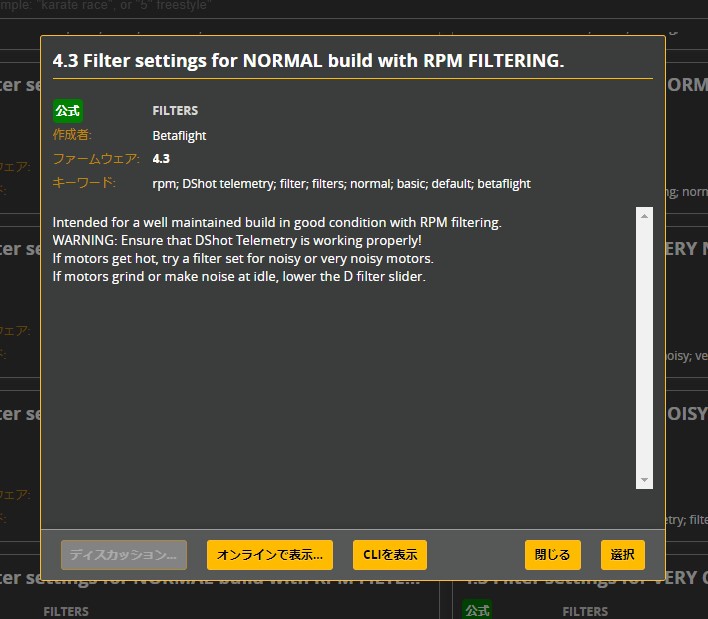
4、プリセットからフィルターとRCスムージングを設定する
Betaflight4.3では各種の設定をひとまとめにしたプリセットが使用できます。ここではRPMフィルターを使用するように設定したので、それに合わせたフィルター設定をプリセットから適用していきます。
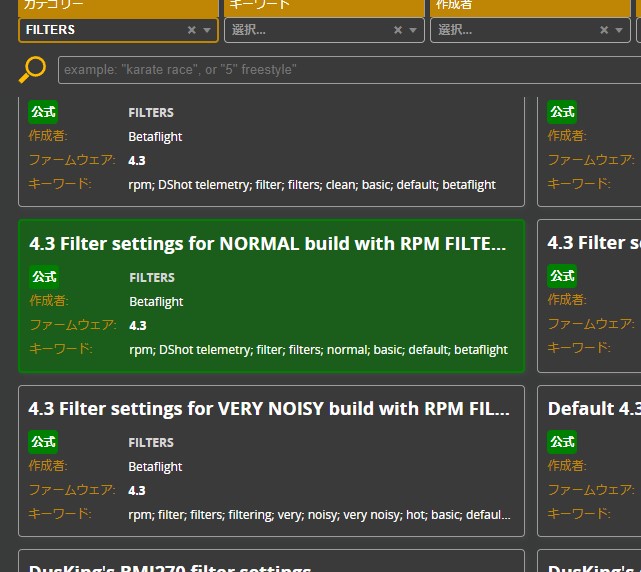
Betaflight Configuratorのプリセットタブを開きます。
左上のカテゴリーからFILTERSにチェックを入れます。するとフィルター関係のプリセットが表示されます。

4.3 Filter settings for NORMAL build with RPM FILTERING をクリックします。
プリセットには、機体のノイズや共振が多い機体はNOISY、少ない機体はCLEANなどのようにいくつかの種類があります。またRPMフィルターを使用しないWITH NO RPM FILTERINGもありますので適切に選択します。
右下の選択をクリックします。
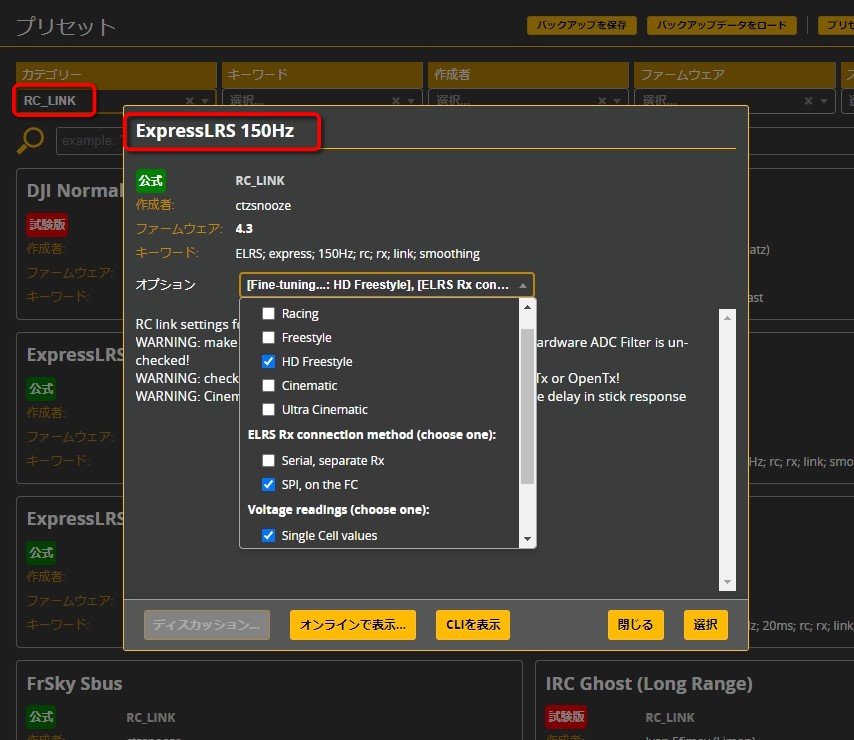
今度はRCスムージングのプリセットを選択します。
RCスムージングは電波の関係でRC信号の欠落や不良パケットなどの正常でないRC信号による乱れを抑制し、滑らかなフライトを実現します。ウルトラシネマティックな設定にするとFPV映像がまるでリアルタイムにスタビライズされているような感覚になります。
カテゴリーでRC_LINKにチェックし、ExpressLRS 150Hzをクリックします。(150Hzの部分はバインド後に送信機のLuaスクリプトから設定した周波数となります。)
オプションからフライトスタイルを選択し、SPIレシーバーですのでSPI, on the FCもチェックします。選択をクリックします。これでフィルターと同時にプリセットを二つ選択していることになります。
保存して再起動をクリックして選択したプリセットを適用させます。
5、CPUのオーバークロックをする
Betaflight4.3では、FCがF411の場合は処理落ちをを防ぐためにCPUのオーバークロックを設定します。
ConfiguratorのCLIタブで下記のコマンドを入力してEnterキーを押します。
set cpu_overclock = 120MHZ
saveなお、Betaflight4.3からはCPU負荷の表示方法が変わりました。CPU負荷が70%くらいなら正常です。
フライト

フライトでは2S 300mAh と 650mAh のリポバッテリーを使用しました。充電終了電圧は共に4.2Vです。
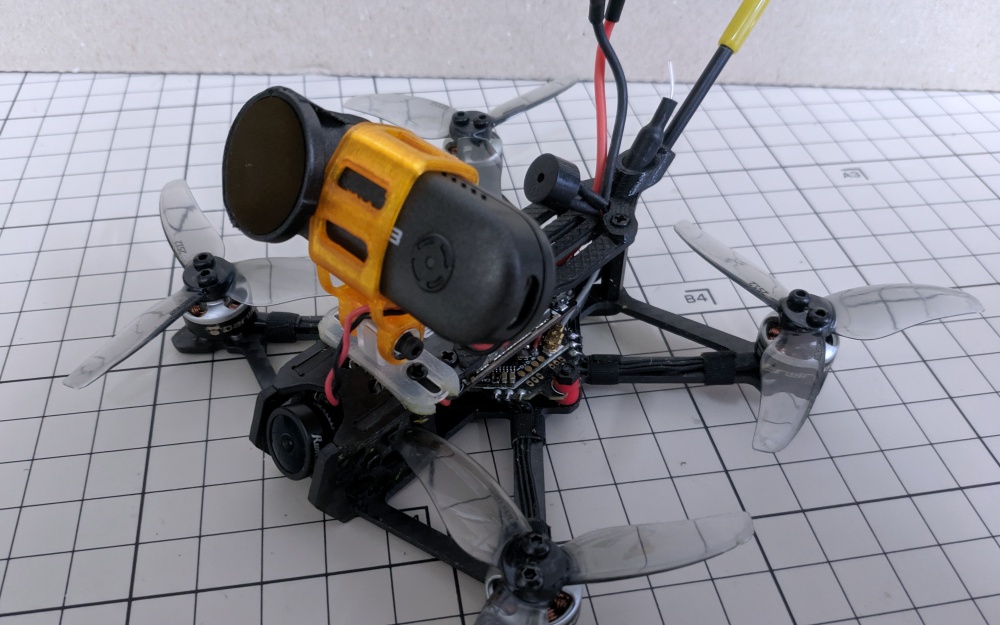
もちろんRunCam Thumbカメラも付属のマウントとホルダーで搭載して撮影します。
デフォルト設定は穏やかフライト
デフォルトでは甘めな設定になっています。
RunCam Thumbカメラを搭載しているのでその重量で機敏性が犠牲になっているのもありますが、緩やかなフライトが出来ます。ピーキーでないので初心者でも飛ばしやすい感じですね。
数回のフライト後にOSDからPIDスライダーを調整してもう少しシャキッとさせました。
しかしプロペラのピッチが小さいのが影響しているのかスピード感が足りません。特に地表に近づいたときのリカバリーが遅れるのは明らかにパワー不足だと思います。したがってバリバリにフリースタイルを決めるようなフライトは厳しいかもしれません。あ、RunCam Thumbを降ろせばそれなりに飛ばせるかもしれません。(未検証につき次回を待て!)
RunCam Thumbの付属ホルダーは割れやすい
RunCam Thumbに付属していたマウントとカメラホルダーを利用しました。
マウントの下に付属していた振動吸収材の様なマットを敷きましたが、機体の振動が伝わります。
またカメラホルダーはすぐ割れてしまいます。今回はクラッシュで割れましたが、他に所有しているホルダーはマウントにネジ止めしてる時に割れてしまいました・・
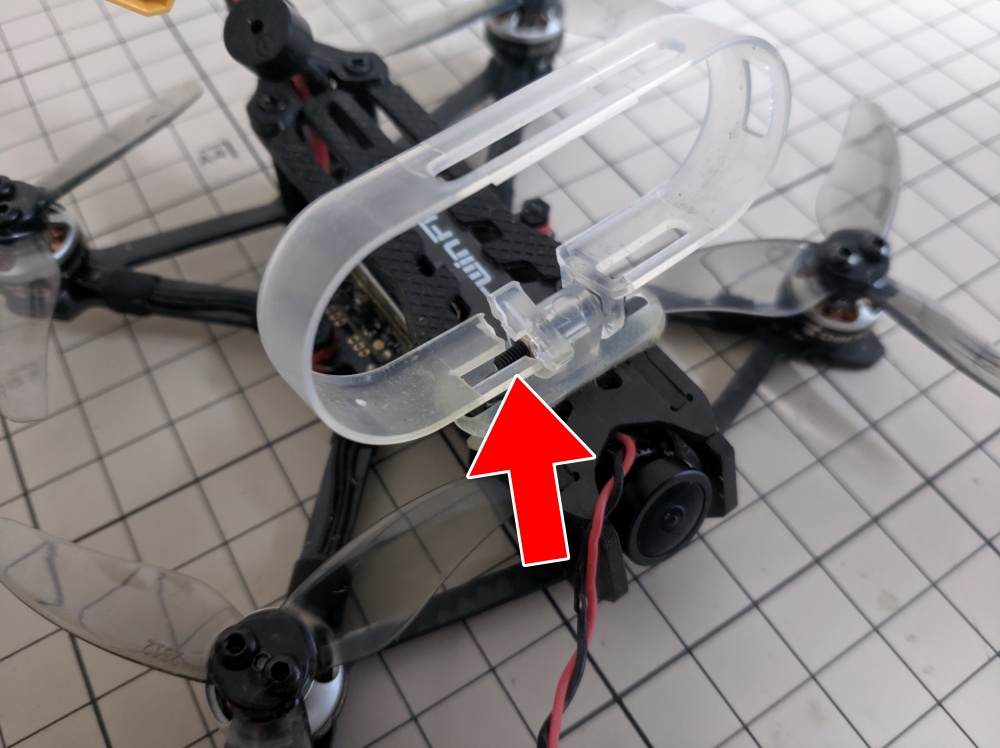
代わりに3Dプリンターで柔らかい素材のTPUを使用してホルダーを作ってみました。マウント部分は付属のものをそのまま使用しています。
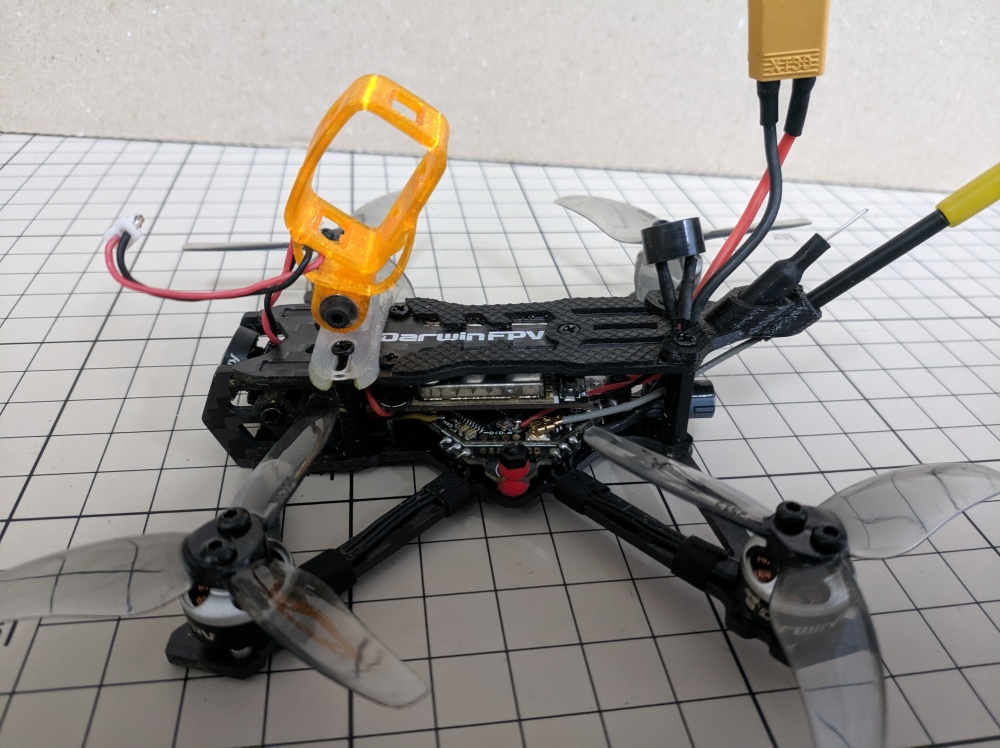

3Dプリンター用のSTLファイルはこちらからダウンロードできます。
ナット固定用の穴を上にして横倒しにして印刷します。
フライト動画
フライト動画は3つに分かれています。
冒頭には、改良したカメラホルダーで撮影し、Gyroflowでスタビライズ。
付属のカメラホルダーで撮影し、スタビライズ無し。
改良カメラホルダーで撮影し、スタビライズ無し。
メイデンフライト早々に木に引っ掛けて予備のないプロペラを曲げてしまったため、手で修正してフライトしていますw そのため機体そのものには振動が残っています・・・
フライト時間ですが、2S 300mAh、650mAh共に新品では無いのでへったっていると思いますが、約3分と5分のフライトが行えました。
次回はプロペラを交換してフライト
RunCam Thumbの設定を間違えてまだ綺麗なスタビライズ動画が撮影できていません。次回は見てて気持ちいい動画を目指してフライトしてきます。たぶん。
またプロペラももう少しピッチのある物でフライトする予定です。
DarwinFPV TinyAPE Freestyle は100g未満のお手軽フリースタイル機としてかなり楽しめそうな気がします。現在はまだ最適設定ができていませんので少しずつ自分に合った設定にしていくのも楽しみですよね。またFHD動画が撮影でき、しかもGyroflowでスタビライズして滑らか動画が出来ちゃうのも魅力です。しばらくTinyAPEで楽しんでみたいと思います。
予備のプロペラは早めに購入しておきましょう。
修理用のフレーム部品単体では発売されていませんが、DarwinFPVのサイトではフレームキットとして$19.9で購入できるようです。


