

FC設定の確認
FCのファームウエアは Betaflight 4.1.1 でした。
下記にデフォルト設定の CLI Diff をファイルにしておきます。
一応こちらはフルダンプです。
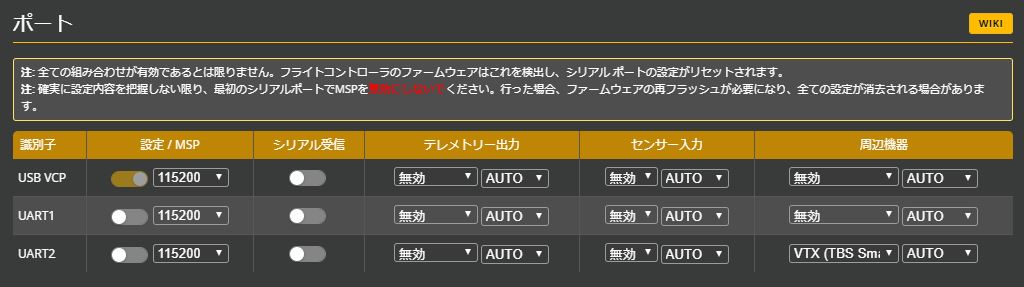
ポート設定。内蔵SPIレシーバーを使用しているので UART1 は空いています。UART2 にはVTXのコントロール用に SmartAudio が割り当ててあります。
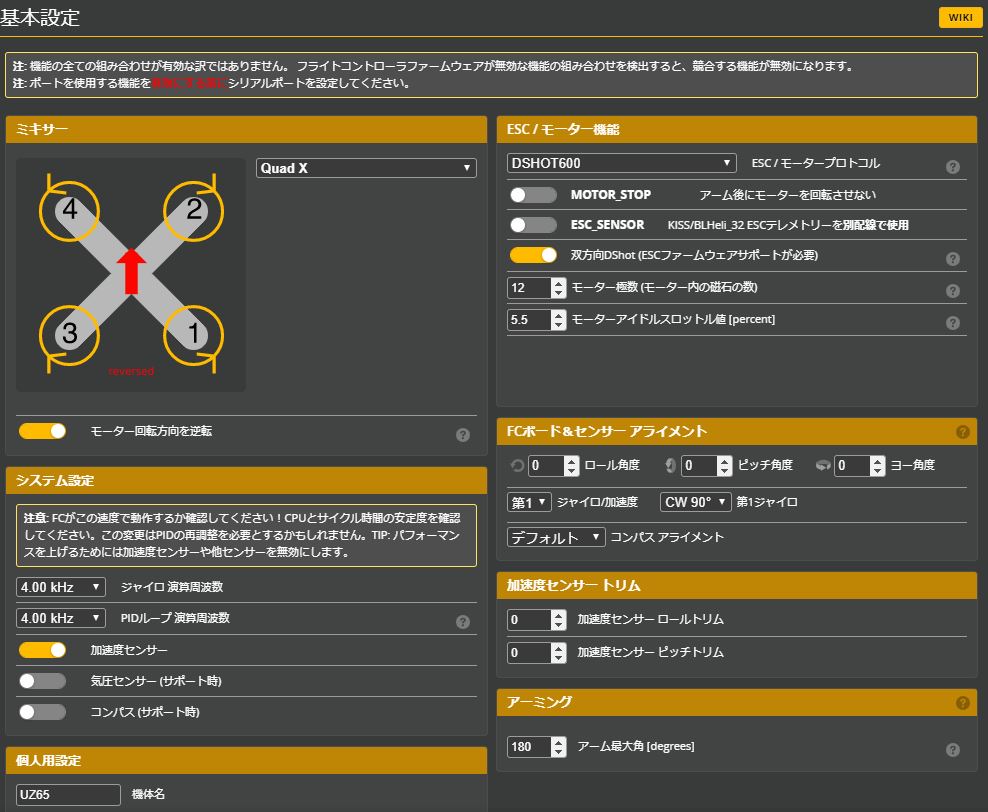
基本設定。双方向DSHOT が ON になっています。ということはRPMフィルターが使えるようにESCのファームウエアも対応版になっているのでしょうか?なお、DSHOT600 が選択されていますが、PIDループが 4K になっていますので、DSHOT300で十分です。ここは負荷低減のために後ほど DSHOT300 に変更します。ジャイロが90度回転しています。
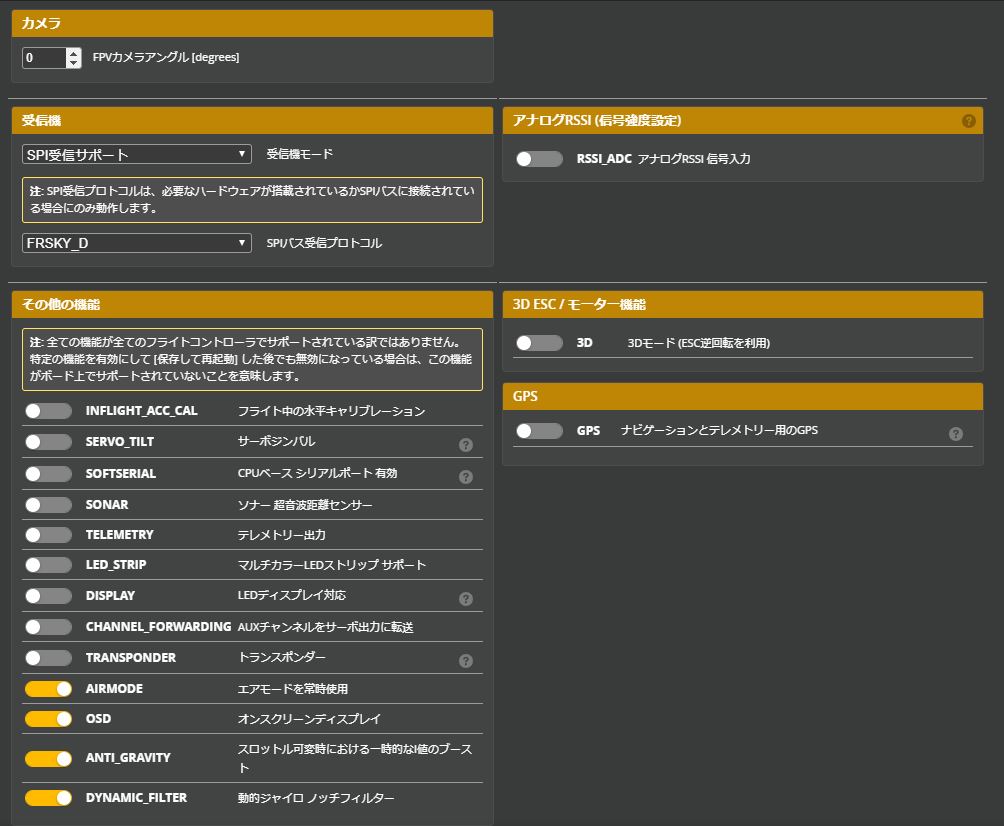
レビュー機は FrSkyモデルなので、レシーバーは FRSKY_D が選択されています。
電源・バッテリー。電流センサー付きなのでスケール1175が設定してあります。警告電圧値は、実際に飛行させたところもう少し上げた方がよさそうです。付属のバッテリーは 3vからの電圧降下が急激ですので、少し離れたとこから戻してるとブラックアウトすることがあります。0.1v 上げて警告電圧3.1v、最小電圧3.0v にしました。

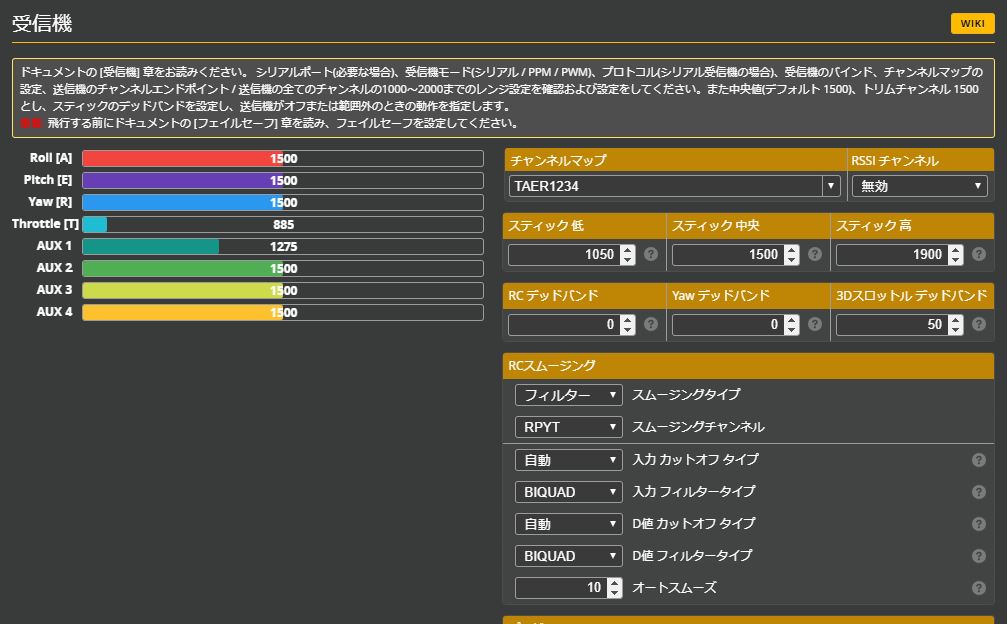
受信機。ここはお使いの環境に合わせます。
モード設定。ここも普段使用する設定に変更しましょう。基本設定で、常時エアモードがONになってるので、ここにはエアモードの選択は出てきません。

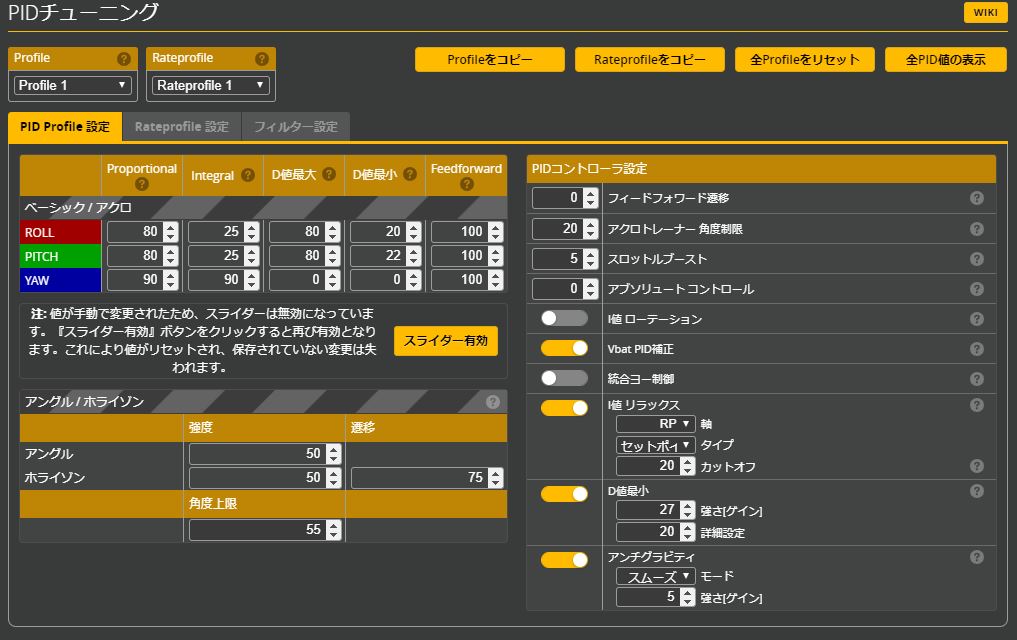
PID設定。独自の設定がされています。P値D値とも結構高めですね。
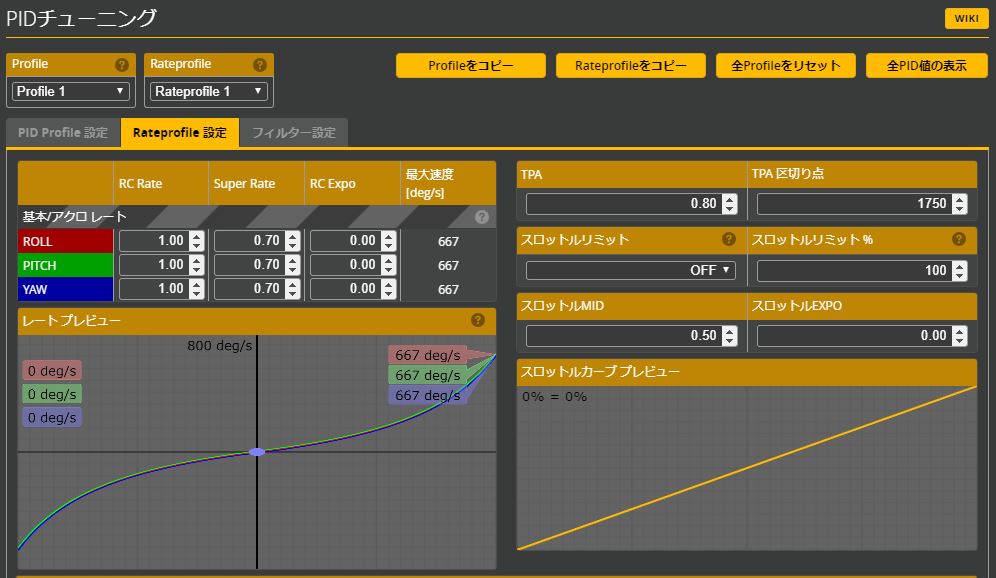
レート設定はBetaflightのデフォルトのままです。
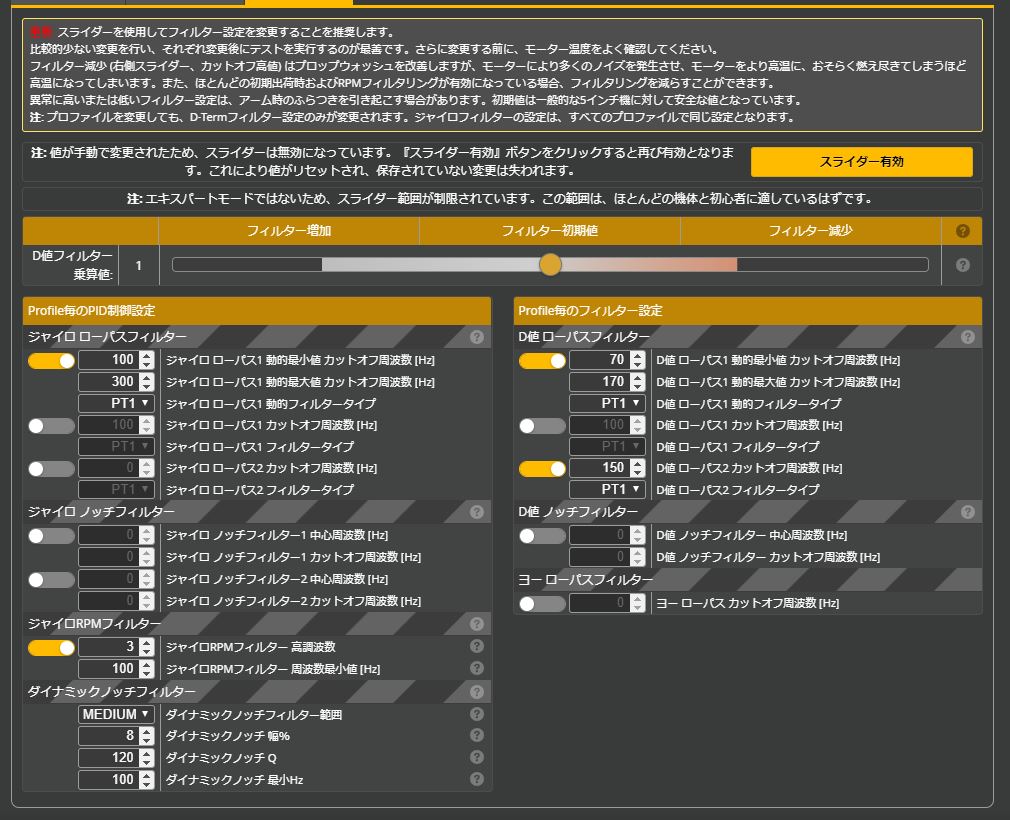
フィルター設定。デフォルトから変更されてあります。
VTXテーブルも設定してあります。

ブラックボックス用のメモリは搭載していないので、無効に変更しておきましょう。負荷が減ります。

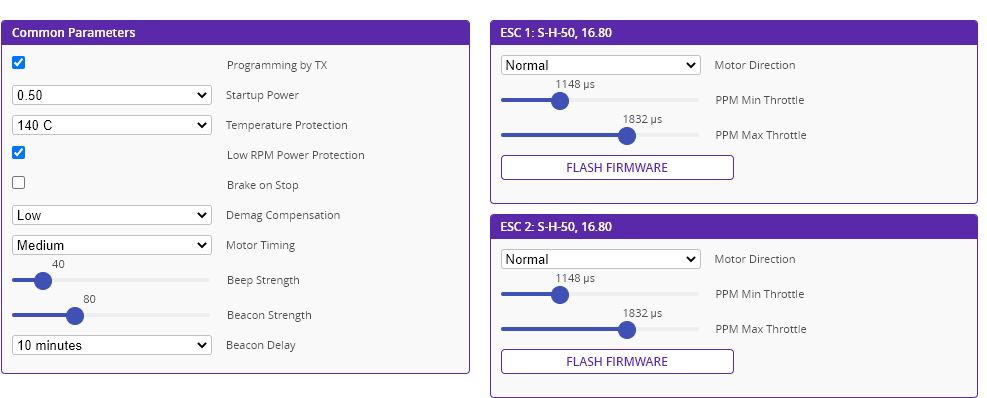
ESC設定の確認
ターゲット名が、S-H-50 でバージョンが16.80 になってるので、JazzMaverick氏 作成のファームウエアですね。PWM周波数は分かりませんが、16.80を使用しているなら48KHz版ではないでしょうか。
なお Betaflight 公式文書によると、JazzMaverick版 16.80 は Betaflight と互換性が無いので使用しないように言われています。Betaflight の wiki の 双方向DSHOTとRPMフィルターのページには、

警告! – JazzMaverickの非公式なベータ版BLHeli_Sファームウェアは、16.8、16.9、またはそれ以降のバージョンはRPM Filteringと互換性がないので避けてください。作者は、RPMテレメトリデータの供給速度を低下させる望ましくない変更を行いました。その結果、RPMフィルタリングはモータの振動をうまく追跡できず、フィルタリングの性能が低下し、モータが高温になる可能性があります。オリジナルの16.73バージョンをお勧めします。
(DeepLにて日本語に翻訳)
と記載されています。
しかしながら、バージョン 16.73 には48KHz版がありません。したがってバージョン16.77 の 48KHz版に入れ替えた方がいいでしょう。16.77版にはスロットル値に対してRPM出力が非直線性の問題がありますが、許容出来る範囲だと思います。
無料のJazzMaverick版の新しい名前である BLHeli_M で48KHzが使用できます。詳しくは下記記事をご覧ください。

まとめ
Happymodel Mobula6 の後発で発売された Eachine UZ65 ですが、スペックだけからは伺い知れないパワーを持っているのでしょうか?実際にフライトで確かめてみたいと思います。少し大きい35mmのプロペラとモーターの実力が気になりますね。
フライト前に次の変更をしました。
- DSHOT600 → DSHOT300
- ESC 16.80 → 16.77 48KHz
次回はフライト編です。
購入リスト
Eachine UZ65 はBanggood で購入できます。

予備部品の販売も始まりましたのでリンクしておきます。





