

ブラックボックスを搭載したWhoop用のFCでシネマティックな撮影が出来る75Whoopを作ってみました。
Betaflightがブラックボックスに記録したジャイロデータを使用して、撮影した動画のスタビライズ(ブレ補正)が出来ます。
動画にGoProと同じ形式でジャイロデータを付加し、あたかもGoProで撮影したようにReelSteady GOを騙してしまう方法や、独自のスクリプトを使用するGyroflowなどでスタビライズすると驚くほどのスムーズな動画になります。
今回はWhoop用でありながらブラックボックスを搭載しているFCを入手しましたのでこれを使用します。
なお、ブラックボックスのジャイロデータを使用してスタビライズする2種類の方法はこちらの記事で解説しています。

使用するパーツ
今回使用する各パーツは以下の通りです。
FC
65mm、75mmのフレームに搭載できるFCでブラックボックスを搭載している製品はほとんどありません。以前 iFlight製のFCが搭載していたことがありましたが現在は入手できません。いわゆるツースピック用のFCではブラックボックスを搭載している製品がありますが、FCの幅が広くてフレームに収まりません。
探し回った結果唯一見つかったのが、JHEMCU SH50A F4 というFCです。
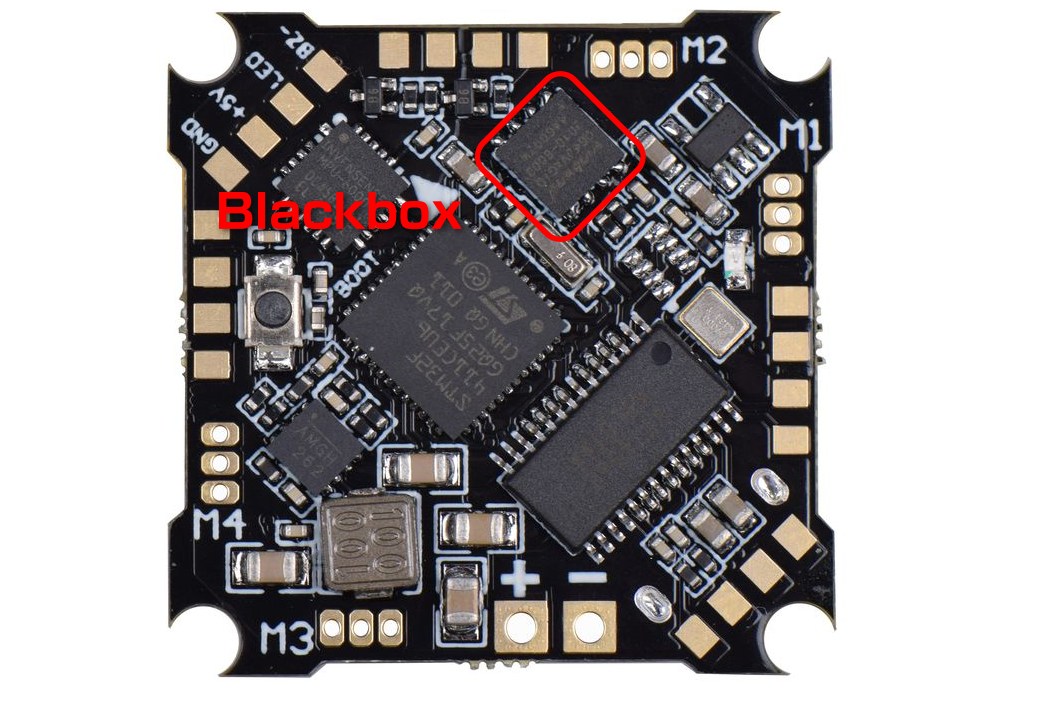

FCに使われるブラックボックス用のフラッシュメモリは「Winbond」と書いてあるチップです。このチップが載っているFCを探すことになります。
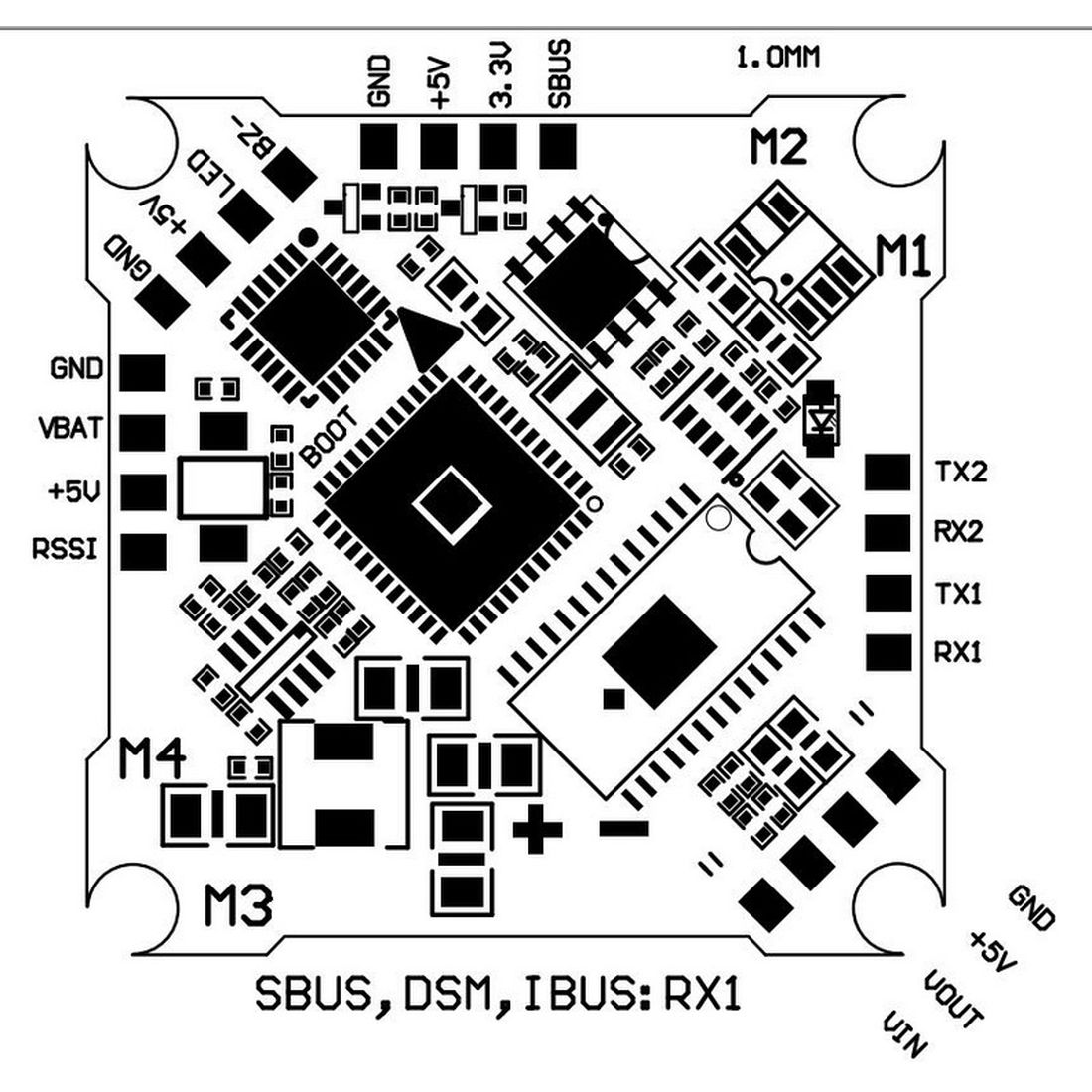
FCのスペックは以下の通りで、ESCは5Aまでです。
| CPU | F411 |
| 入力 | 2~3Sリポ |
| BEC | 5V 2.5A |
| Blackbox | 8M |
| 取り付けサイズ | 25.5mm x 25.5mm 3mm |
| LED、ブザー | 接続可能 |
| ESC | 5A BLheli_S |
| 重量 | 3.3g |
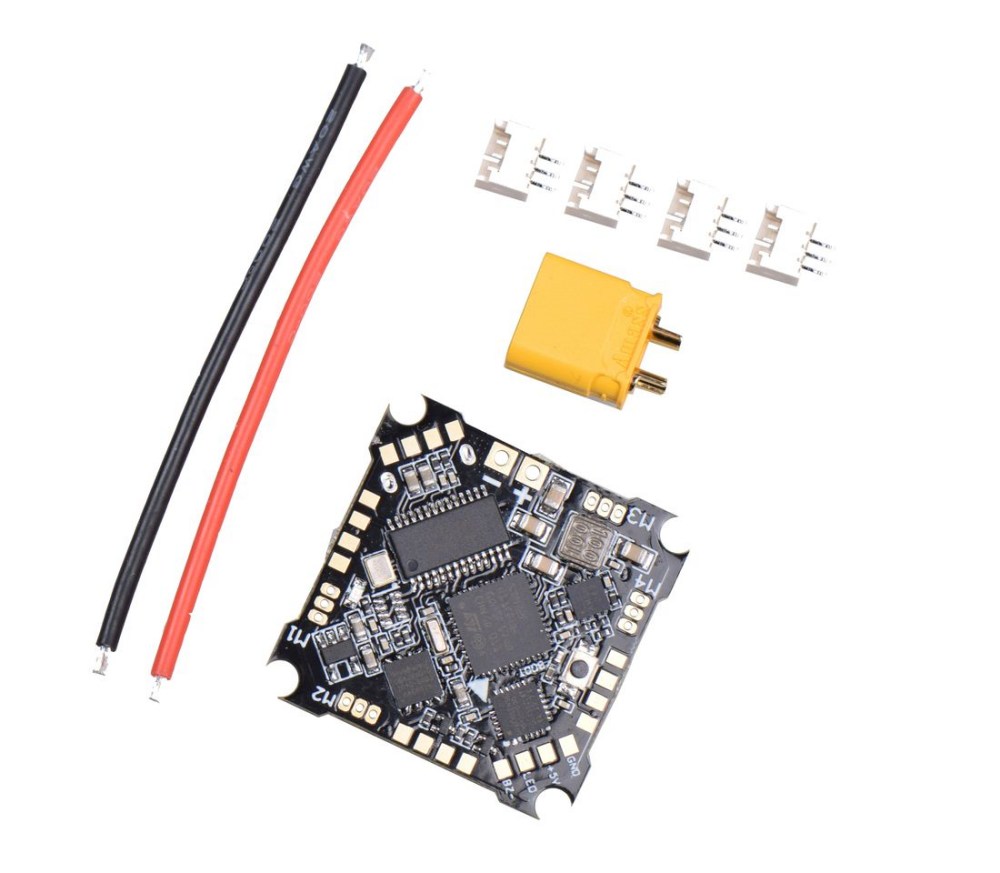
写真を見るとFCの側面が内側へ少し凹んでいるのが分かると思います。Whoopフレームのダクト部分に当たらないようになっています。FCとESCだけですのでレシーバーやVTXは外付けで搭載する必要があります。
入手先はBanggood、Aliexpressの複数のストア、xt-xinte.com、amazon日本などから入手できます。下記はBanggoodの製品リンク。(記事作成時 $29.6)

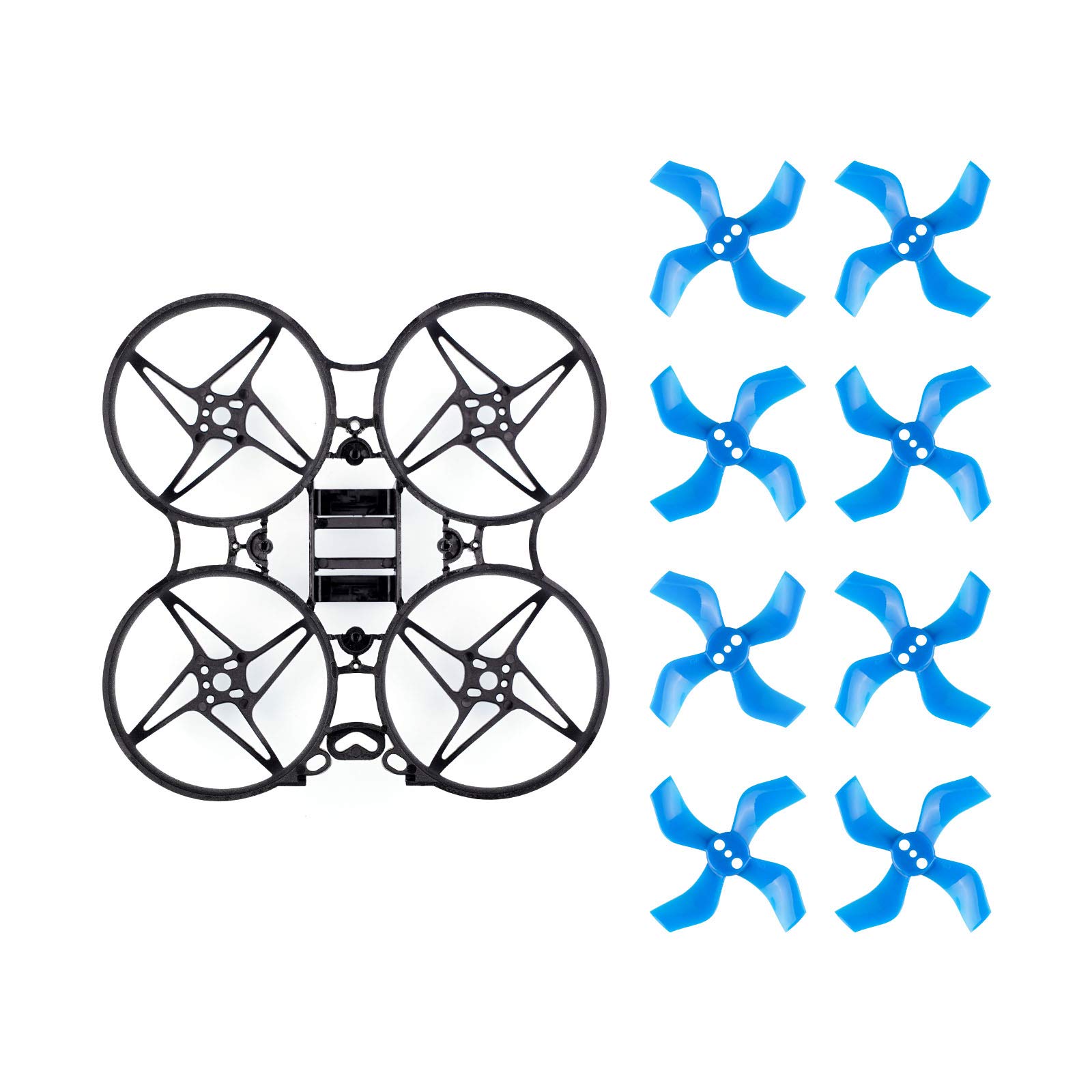
フレーム
今回は75mmのWhoopですので、Betafpv製の Beta75X V2フレームを使用しました。
このフレームは3穴と4穴の両方のモーターに対応しています。
下記リンクはアマゾンのフレームキット(記事作成時 1,600円)
モーター
使用するESCが5Aまでなので2Sバッテリーでのフライトを基準に選びます。今回はずいぶんと前に購入したままになっていた、LDARC製の 1102 9300KVモーターを使用しました。1.0mmシャフトで取付穴はM1.4 の3穴です。
今では入手しずらいモーターですので1103あたりのモーターを選べばよいでしょう。
下記リンクはQwinoutのLDARC 1102 9300KVモーター。

カメラ&DVRボード
FPVカメラはスプリットタイプの物で、Caddx Loris Micro 4K を使用しました。
Caddx Loris はnanoタイプ(カメラ幅が14mm)の製品が初めに発売されたのですが、レンズが小さくて解像度が思ったより良くないです。そこでカメラ幅19mmのMicroタイプが発売されました。レンズが大きくなりました。が、解像度が上がったかどうかは微妙です。


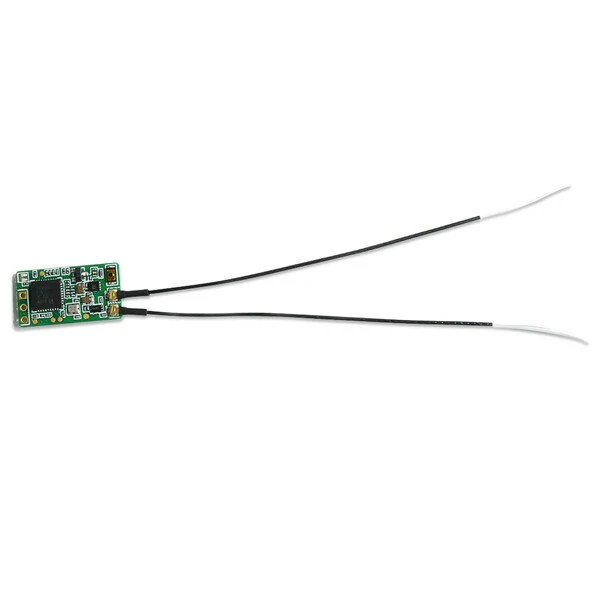
レシーバー
FCに内蔵レシーバーはありませんので、FrSky XM+を使用しました。
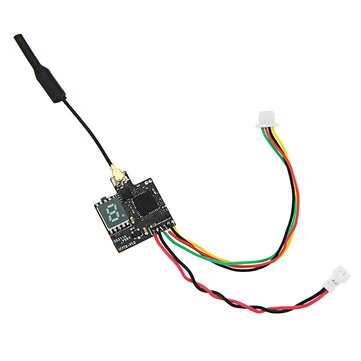
VTX
安上がりで安定していて開局も楽な、Eachine VTX03S を使用しました。
プロペラ
モーターのKV値がやや低めなので、Gemfan 1636 4枚羽根を使用しました。

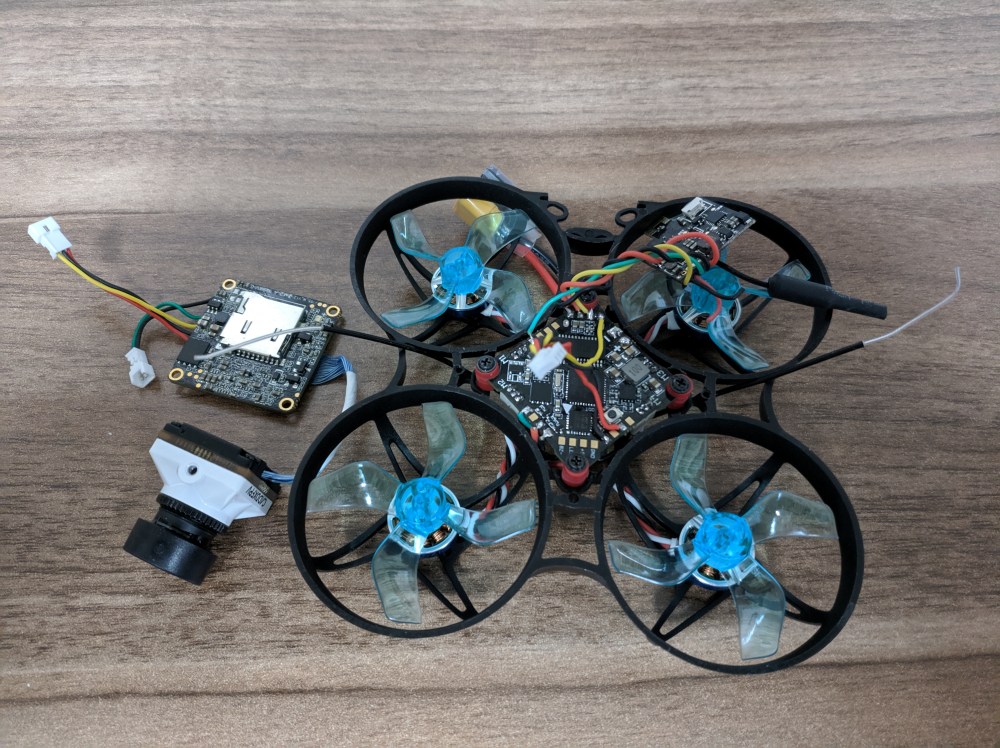
組立て
FCがWhoopフレームに干渉せずに搭載できるので特に苦労すること無く組み上げることが出来ます。
以下に特記事項を上げていきます。
モーターケーブルはネジる
モーターのケーブル周辺では高周波や電界と磁界が発生しノイズの原因になります。これを少しでも軽減するために3本のケーブルをネジってから取り付けます。
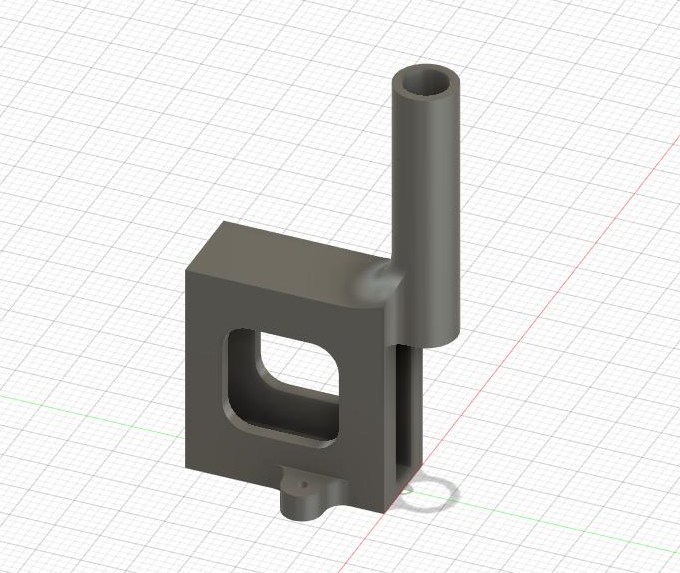
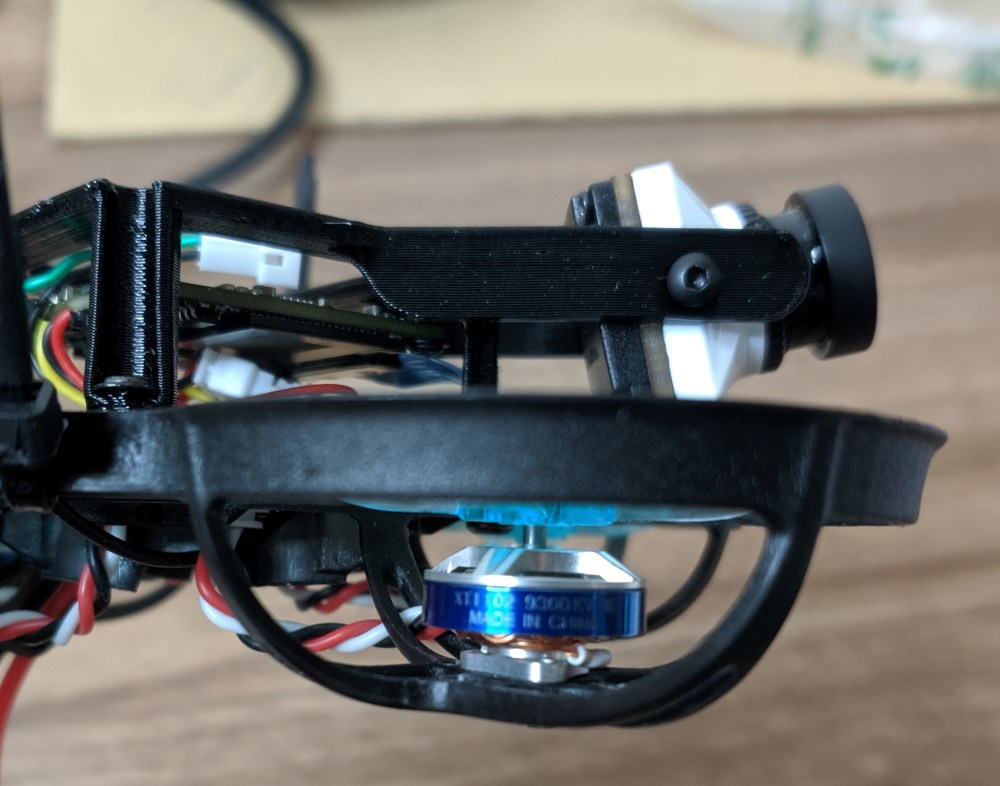
Caddx Loris Micro 4KのDVRボードの取付
これはFCの上に積み上げようと思いましたが、長いネジが無かったので3Dプリンターで、カメラマウントとともに印刷しました。デザインのセンスが無いので変な形ですが・・・
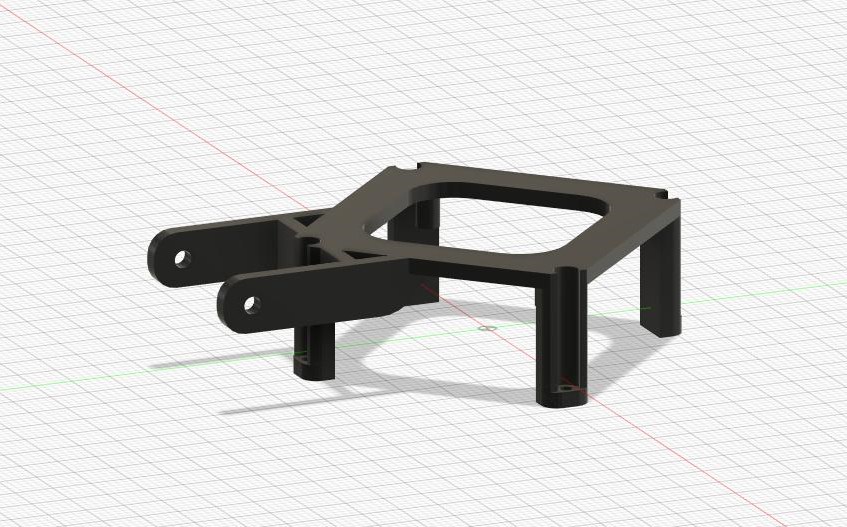
実際に取り付けるとこうなります。

使用してみたところ、素材のTPUの弾性が効いていて、FPV映像が揺れたりすることもなくうまく機能しているようです。
レシーバーの取付
FrSky XM+レシーバーは、FCの下の空間に設置しました。設置といっても何も固定していませんが。

レシーバーのアンテナは左右横に引き出してインシュロックと熱収縮チューブで固定しました。
VTXの取付
Eachine VTX03S も3Dプリンターで出力したパーツで75フレームの後部にネジ止めしてあります。
思いっきり変な形ww
取り付けたところ。


Betaflightの設定
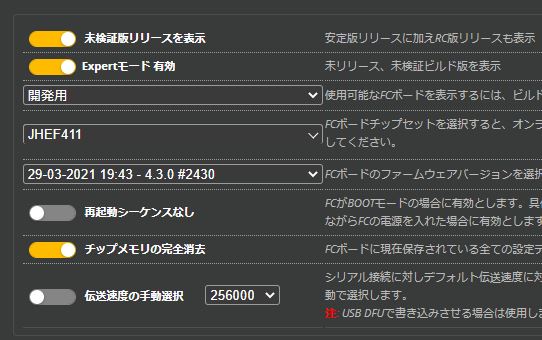
FCに搭載されているブラックボックスの容量が少ないので、記録するログの量を減らすためにリリース前のBetaflight 4.3を使用しています。
(リリース前のバージョンですのでバグがあるかも知れません。自己責任で使用します。)
Betaflight 4.3 を使用するためには、Configuratorもナイトリーの10.8にする必要があります。Expertモードを有効にすると開発用が選択できるようになります。

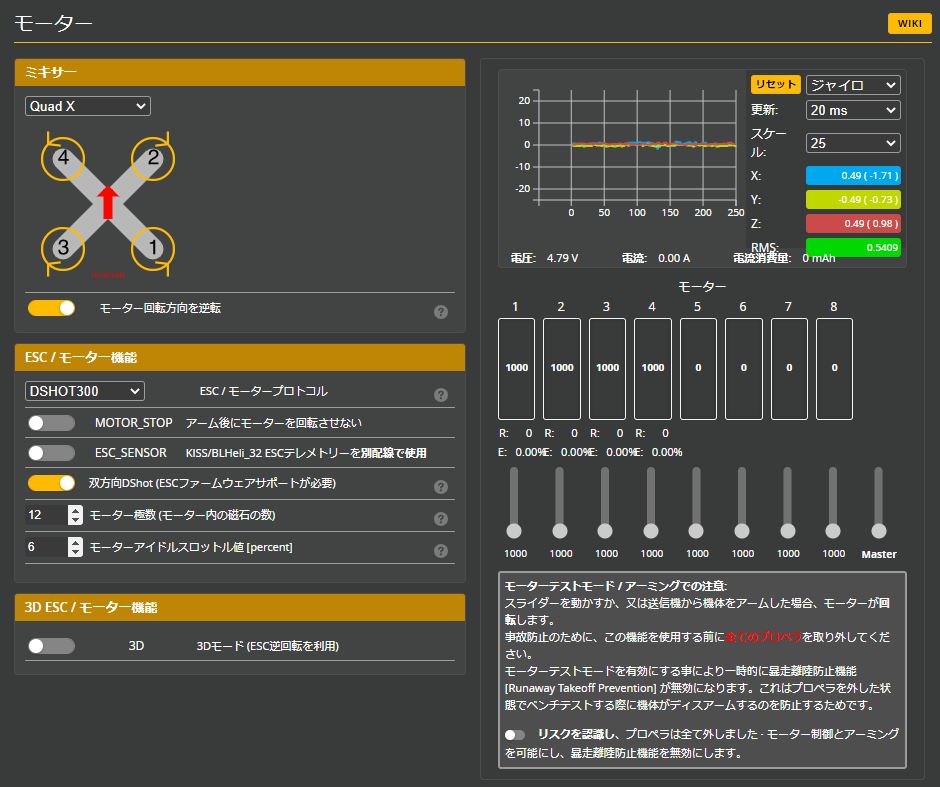
RPMフィルターを使用するために、DSHOT300にし、双方向DSHOTをONにします。
(下図はConfigurator 10.8のモータータブです。)
PID設定タブで、Vbatサグ値補正を100%にして電圧降下を感じないように設定します。
推力線形化を25%にしてスロットルの出力曲線を線形化し、全域にわたってPID応答性を同じようにします。
D値最小はOFFにします。

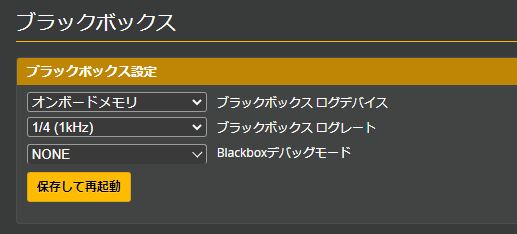
ブラックボックスのログレートを1KHzにします。
CLIタブで、ブラックボックスへ記録しないジャイロ以外のデータを選択します。ONにすると記録しません。
set blackbox_disable_pids = ON
set blackbox_disable_rc = ON
set blackbox_disable_setpoint = ON
set blackbox_disable_bat = ON
set blackbox_disable_mag = ON
set blackbox_disable_alt = ON
set blackbox_disable_rssi = ON
set blackbox_disable_debug = ON
set blackbox_disable_motors = ON
set blackbox_disable_gps = ON
Betaflight WikiのチューニングノートにあるHDセッティングを適用します。
set iterm_relax_cutoff = 10
set rc_smoothing_auto_smoothness = 20
set ff_interpolate_sp = AVERAGED_3
set ff_smooth_factor = 40
set ff_spike_limit = 55
set ff_boost = 0
set feedforward_transition = 40
set yaw_lowpass_hz = 70
set throttle_boost = 5
set throttle_boost_cutoff = 10
set dyn_lpf_dterm_curve_expo = 7
set gyro_rpm_notch_q = 800ESCの設定
RPMフィルターを使用するので双方向DSHOTに対応したファームウェアが必要です。
今回はJESCでもなく、BLHeli_Mでもなく、Bluejayを使用しました。
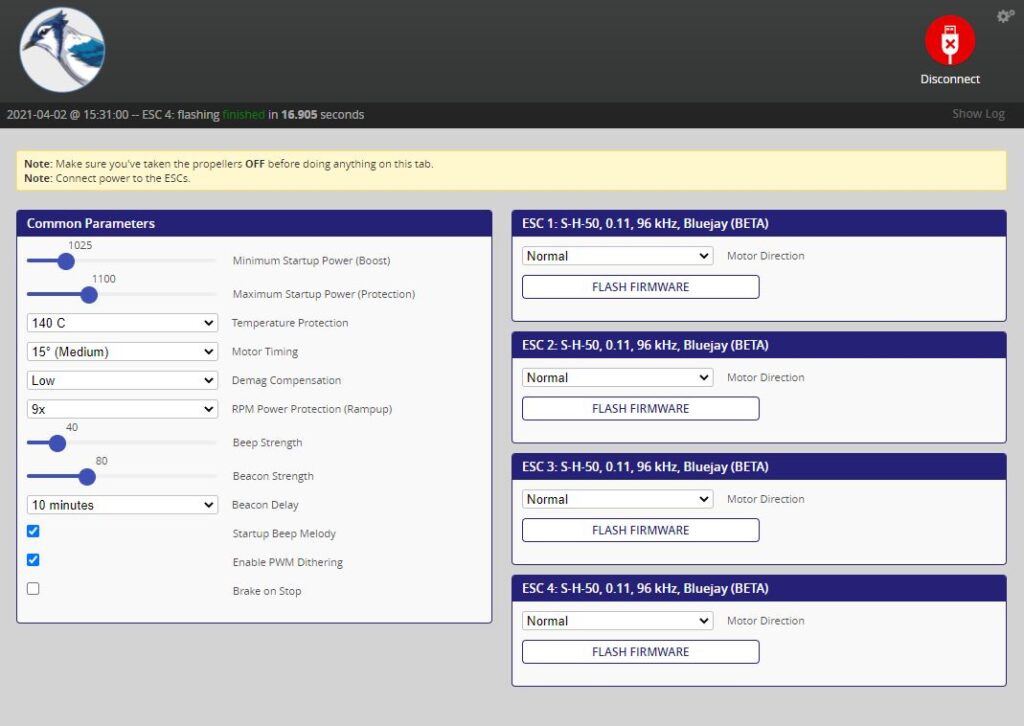
最新のバージョン0.11で96KHz版を使用しています。
Bluejayは無料で使用できます。まだベータ版ですがBLHeli_Sからの派生であり安定しているようです。

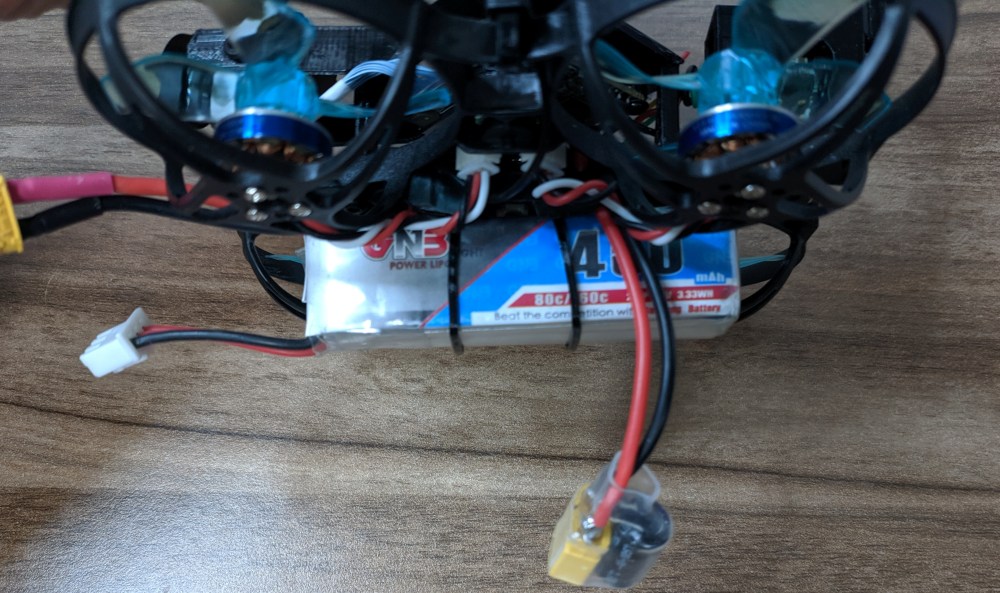
機体写真


フレームのバッテリーホルダーはサイズが合わなかったので切り取り、3Dプリンターで輪ゴムの代わりのようなものを作りました。

フライト&スタビライズ
さて、機体が完成したのでさっそくフライトしてみます。
2S 450mAhのバッテリーで3分のフライトが出来ました。Caddx Loris Micro 4Kの設定は 4K 60fpsで録画しました。
ブラックボックスに記録されたログを使用してGyroFlowでスタビライズした動画はこちら。
(分かりやすいようにスタビライズしていない動画と並べてあります。)
こちらは上の動画の全面スタビライズ版

