

Betafpv の Beta85X V2 は GoPro Lite カメラ(剥きプロ)を搭載するのが当たり前とでも言うような機体構成で販売されています。フライトコントローラーの設定もGoPro Liteを使用することを前提とした設定がされていました。その内容を確認していきます。
BETA85X V2はBanggoodで購入できます。

Betafpv Beta85X V2 は Betaflight 4.1. 1 搭載
各画像はクリックやタップで拡大できます。
なんかBetaという文字が3つも並んでますが、Betaflightのバージョンは 4.1.1 でした。

「ポート」ではUART1にレシーバー、UART2にVTX制御用のSmartAudioプロトコルが選択されています。
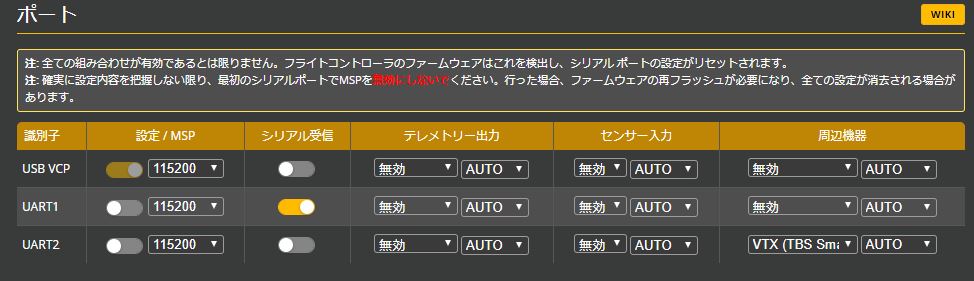
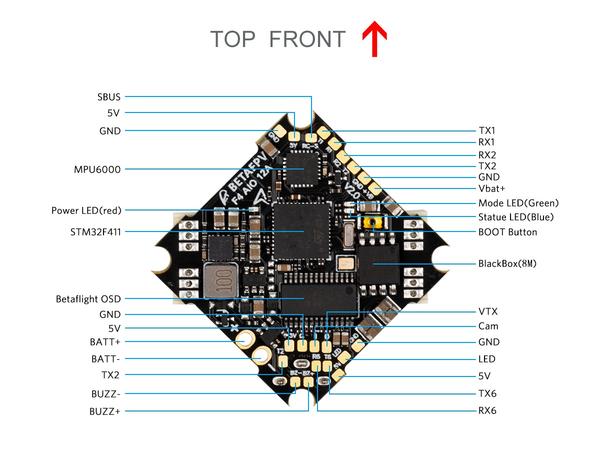
Betafpvサイトの製品ページには、「3 full UARTs (UART1, UART2 and UART6) are available.」と記載されていますが、USRT6はありません。念のためにCLIコマンドのrecourceで確認すると、
resource LED_STRIP 1 NONE
resource SERIAL_TX 1 A09
resource SERIAL_TX 2 A02
resource SERIAL_TX 3 NONE
resource SERIAL_TX 4 NONE
resource SERIAL_TX 5 NONE
resource SERIAL_TX 6 NONE
resource SERIAL_TX 7 NONE
resource SERIAL_TX 8 NONE
resource SERIAL_TX 9 NONE
resource SERIAL_TX 10 NONE
resource SERIAL_TX 11 B03
resource SERIAL_TX 12 NONE
resource SERIAL_RX 1 A10
resource SERIAL_RX 2 A03
resource SERIAL_RX 3 NONE
resource SERIAL_RX 4 NONE
resource SERIAL_RX 5 NONE
resource SERIAL_RX 6 NONE
resource SERIAL_RX 7 NONE
resource SERIAL_RX 8 NONE
resource SERIAL_RX 9 NONE
resource SERIAL_RX 10 NONE
resource SERIAL_RX 11 B03
resource SERIAL_RX 12 NONE
UART6(青字)には何も割り当ててありません。よく見ると11番にB03(赤字)が割り当ててあります。しかもRX(受信)とTX(送信)の両方にB03というのもおかしいですね。
このSERIAL_RXまたはSERIAL_TXの11と12はソフトシリアルで使用します。Betafpvのサイトで記載してたUART6というのはソフトシリアルの事でしょうか?
ソフトシリアルの使用方法は以下の記事で解説しています。

「基本設定」タブです。モーターはプロップアウト(逆回転)になってます。ジャイロとPIDループの周波数は4kHz と 2kHzに設定してあります。アーミング角度は180度でクラッシュフリップが可能になってます。機体名は入力されていませんので「BETA85X_V2」と入れました。
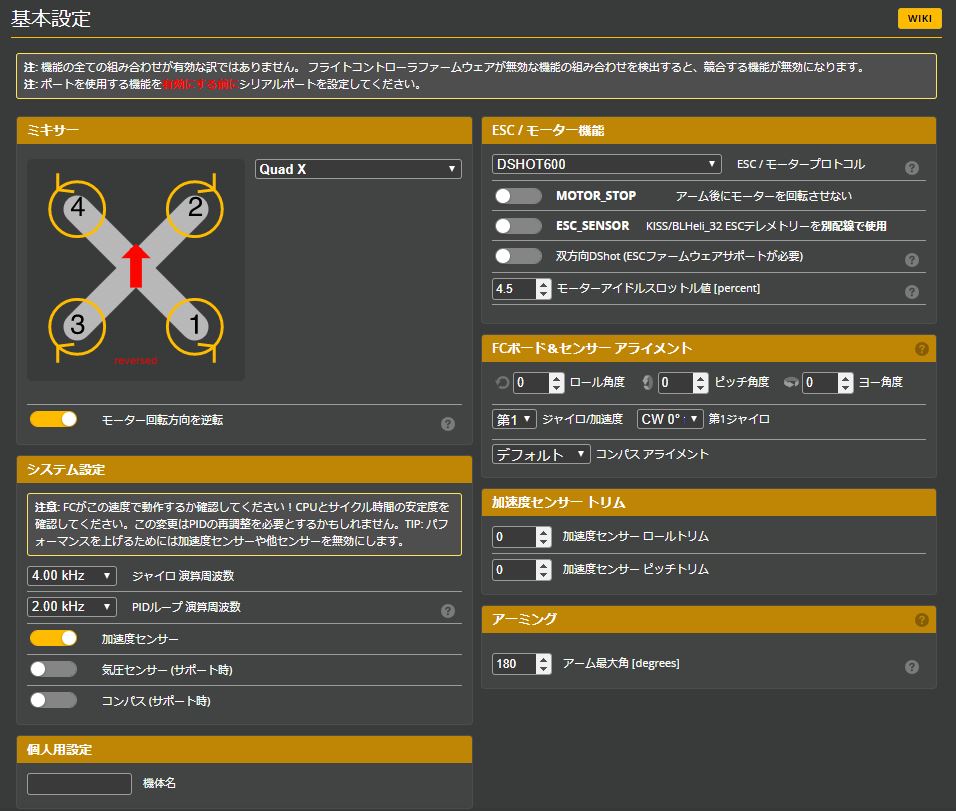
「その他の機能」ではテレメトリーが有効になっていますが、レシーバーが FrSky XM+ でテレメトリーに対応していませんのでここはOFFにします。エアモードは常時使用になっているのでOFFにして、必要なときだけスイッチでエアモードにできるようにします。

ところで先ほどresourceコマンドで確認したソフトシリアルが有効になっていません。必要なときだけONにしてね。って事でしょうか?ではONにしてどこに接続すればよいのでしょうか?FCの説明図にはUART6が記載されていますがそこでしょうか?でも先ほど見たようにRXとTXが同じピンに割り当てられているのでよくわかりません。ここはトラブルを避けるためにUART6のRXとTXパッドは使用しないようにしておきます。なお GoPro Lite カメラの録画のON/OFFで使用するためにLED_STRIP は無効になっています。
「電源・バッテリー」タブ。電流計も搭載されています。最大電圧はHV仕様のバッテリーを使用する予定があるなら 4.4V にしておきます。

「PIDチューニング」タブ。設定がされています。とりあえずこのまま使用してみます。

レートはデフォルト設定になっていますので、好みに合わせて設定します。

フィルター設定はデフォルトの様ですね。これもこのままにしておきます。

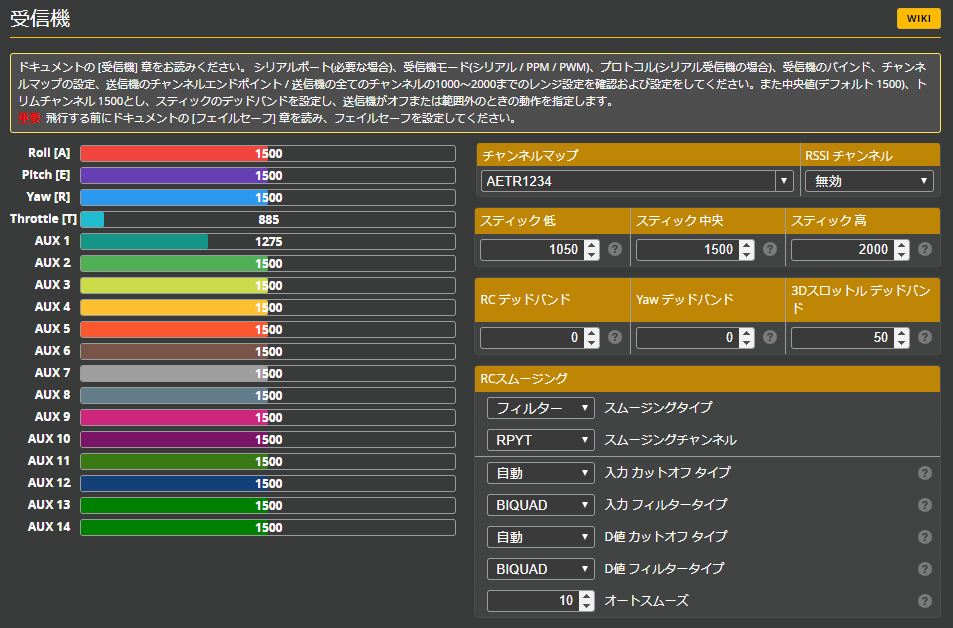
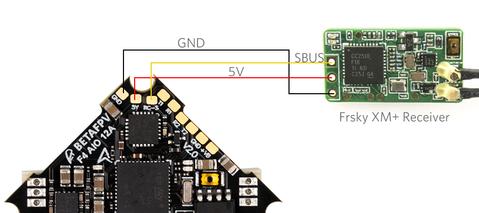
「受信機」タブ。今回は FrSky XM+ レシーバーを使用しているので、16chにRSSIが出力されています。これを受信するようにRSSIチャンネルにAUX12を設定します。(16ch から RCの4ch を引いた数字)
RCデッドバンドは送信機のスティック中央付近の動きを無視する機能です。私はいつも、シネマティックなスムーズなフライトがしたいので、指が震える影響を無くすためにRCとYawの両方に5を入れています。
「モード」タブ。自分にあった設定をします。「基本設定」でエアモードを常時使用をOFFにしたので、AUX2の1700~2100にエアモードを設定しました。これでAUX2のスイッチで
「アングル」「アクロ」「エアモード」の切り替えが出来ます。
AUX3はいつも使用している設定と同じでした。

AUX4に割り当ててあるUSER1はGoPro Lite カメラの録画のON/OFFに使用するものです。送信機のスイッチにAUX4を割り当てると、そのスイッチからGoProをON/OFF出来ます。
わたしは JumperT16 Pro のモーメンタリースイッチである SHスイッチに割り当てました。モーメンタリースイッチは押している時だけONになり指を離すと元に戻ってOFFになるスイッチです。
ここで注意するのが、USER1の有効範囲を示す黄色いバーが無い所がONになります。図では1700~2100の間で、間違ってここに黄色いバーを設定してしまうと、GoPro Lite カメラの電源が入った時に録画ボタンが押された状態になってしまい、正常に起動できませんので1700~2100の間には黄色いバーを設定しないようにします。

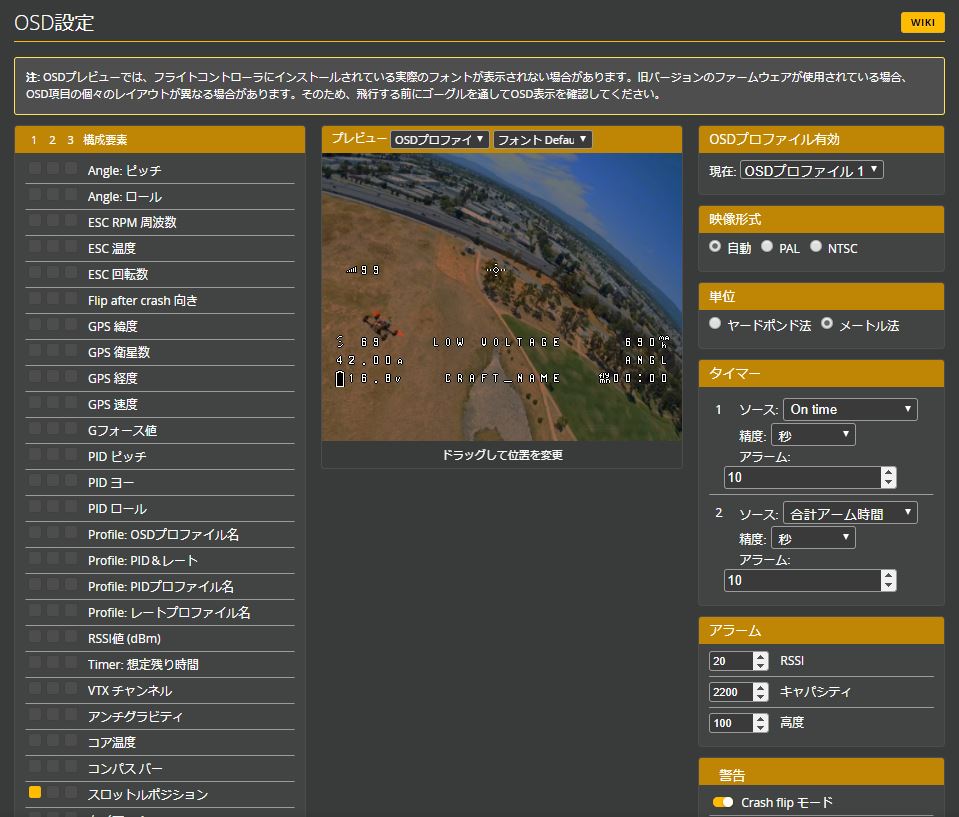
「OSD設定」です。ここも好みの設定にします。
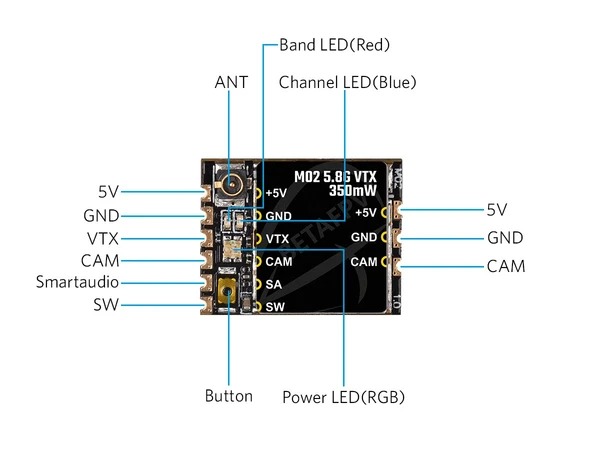
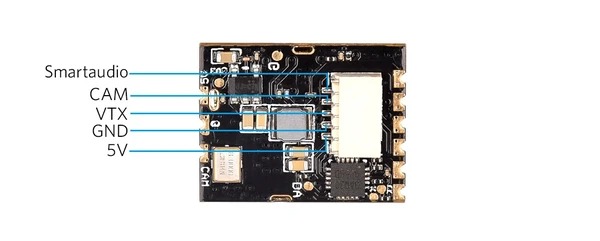
「VTX設定」タブ。初期設定では日本では使用できない周波数にも設定できてしまうので、日本用の設定をファイルから読み込みます。下記の設定ファイルをダウンロードして保存しおきます。「VTX設定」のファイルからロードをクリックして先ほど保存した設定ファイルを読み込みます。

設定の読み込みが完了したら、送信出力レベルを5から4にして1個削除します。ラベルはそのままでもいいんですが BETA85X V2 で使用しているVTXは、25/100/200/350mW の4レベルですのでこの数字に合わせます。一度保存してから、実際に使用するバンドとチャンネル、送信出力を選択して再度保存します。

BETA85X V2 のFCはWhoopタイプには珍しくブラックボックスが搭載されています。
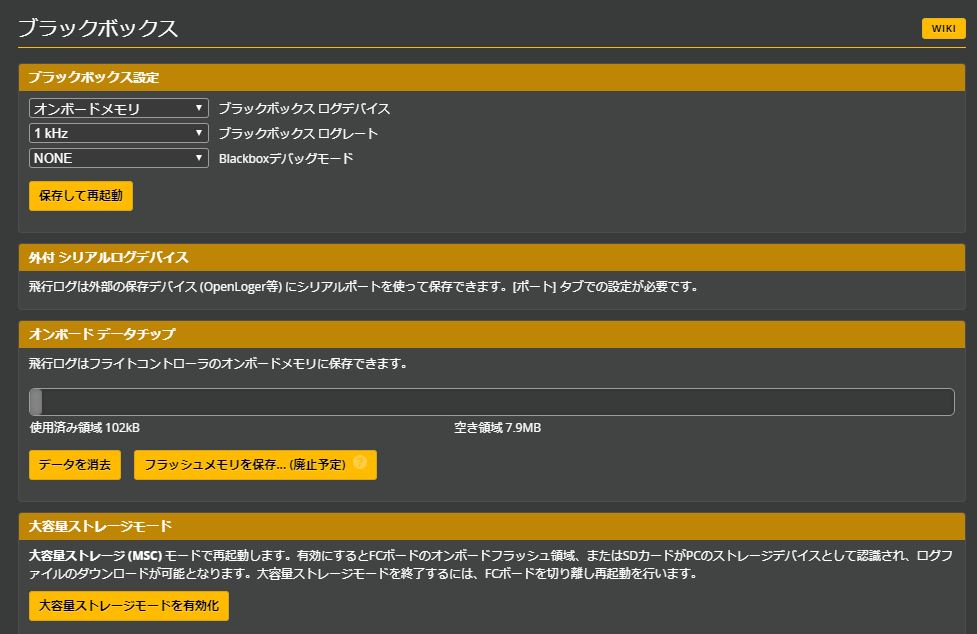
ブラックボックスを使用すると、Blackbox Log Viewer や PIDtoolbox などで機体の挙動を解析できます。ジャイロのノイズなどを解析する場合は、フィルターを通る前の生のジャイロデータを記録するように設定が必要です。べつにログは要らないよ。ってときはブラックボックス ログデバイスを無効にします。
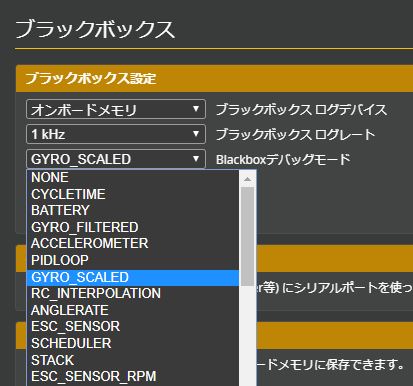
生のジャイロデータを記録するには、BlackboxデバックモードにGYRO_SCALEDを選択して保存してください。
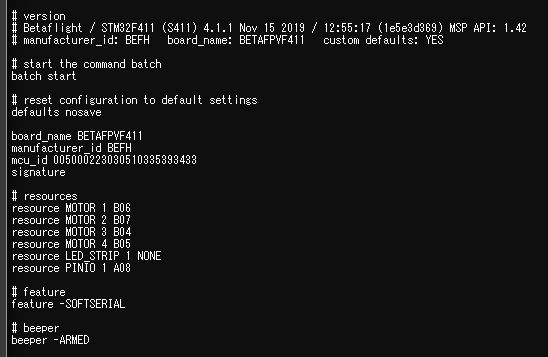
CLIコマンドの diff を入力してデフォルト設定との差分を出力したところで、resource の変更箇所が6か所あります。モーターの所はプッシャータイプにしたのでFC自体も上下逆にひっくり返っています。そうするとモーターへの信号の出力先も逆にしなければなりません。BETA85X V2 では、1番と3番、2番と4番のピン番号(B04~B07)をそれぞれ入れ替えてあります。
また、LEDのパッドに GoPro Liteカメラの録画のON/OFF をするための黄色いケーブルを接続するので、LED_STRIP を無効にし、PINIO 1 にLED_STRIP で使用していたピンA08 を割り当ててあります。
LED_STRIP の ところにPINIOを設定したのでそのPINIOの働きを設定する必要があります。
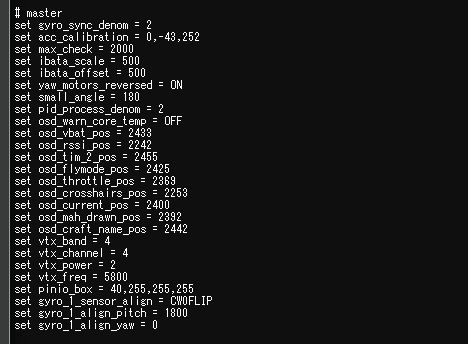
ここでは、set pinio_box = 40,255,255,255 と設定されています。これで「モード」タブのUSER1が使用できるようになります。最初の40がUSER1に該当します。
(PINIOに興味がある方はBetaflight Wikiに詳しい説明があります。)
BETA85X V2 のESCファームウェア
FCと一体型のAIO(オールインワン)ESCです。
ファームウェアは BLHeli_S で ターゲット名が、G-H-25 バージョン16.7 が入っていました。
1番と3番のモーターが逆転(Reversed)に設定してあります。
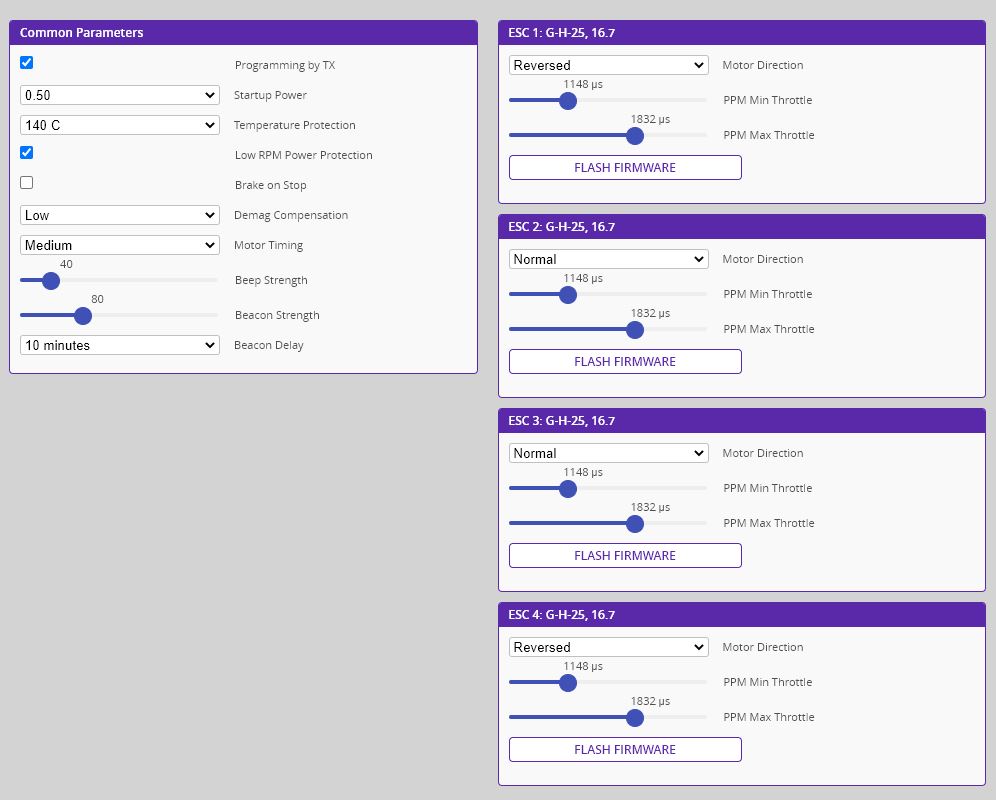
とりあえずこのままフライトしてみてます。後日ESCファームウェアのバージョンアップをして、RPMフィルターやPWM48KHzを設定してみたいと思います。
ダウンロードと各種資料
デフォルトの設定CLIタブから読み込むことで初期設定に戻せます。
VTXの日本用の設定 SmartAudioV2.0版
入手先:Banggood

