

Jumper T16 Pro あるいは 内部モジュールを入手してインストールした場合、初期のファームウェアはブートローダーがインストールされていません。そのためマイクロSDカード上のファームウェアファイルから更新することができません。
ここではブートローダーがインストールされていない初期バージョンのファームウェアを更新します。なおこの更新作業によりブートローダーもインストールされるので、次回からはマイクロSDカードから簡単に更新することができるようになります。
ブートローダーがインストールされていないバージョン
Jumper T16 Pro と自分で内部に設置するように売られているアップグレードモジュールで、ファームウェアのバージョンが、1.2.1.51 の場合はブートローダーがインストールされていません。1.2.1.85 以降のバージョンはブートローダーがインストールされていますので以下の作業は必要ありません。こちらの方法で通常の更新が出来ます。
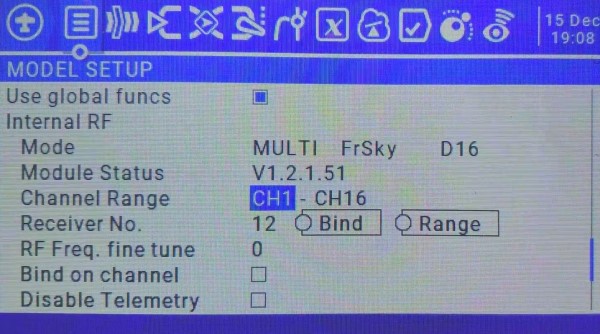
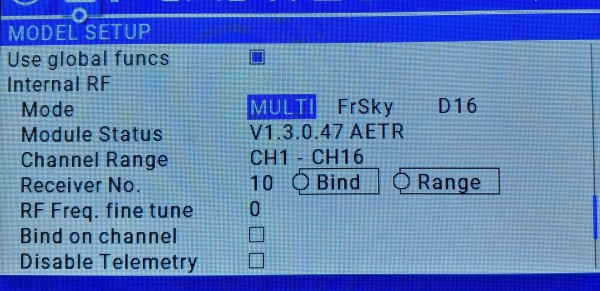
ファームウェアのバージョンは以下のようにして確認します。[MODEL SETUP] で [Internal RF] を有効にします。[Module Status] にバージョンが表示されます。下図では V1.2.1.51 と表示されています。
Jumper T16 を使用するのが初めてで、まだ機体モデルを作成していない場合は、何か一つ作成し Internal RF を有効にしてください。ここで有効になっている機体モデルを選択すると、マルチプロトコルモジュールが通電されます。これはファームウェアの更新時に送信機側の電源を使用するので必須です。
事前準備
必要な物
送信機のファームウェア(マルチプロトコルモジュールのファームウェアではありません。)をOpen TX 2.3.3ナイトリーかRC版(記事作成時)に更新します。
マルチプロトコルモジュールと接続するための、5ピンの1.25mmJSTコネクターとケーブル。
FrSkyのR-XSRに付属しているコネクターが利用可能です。
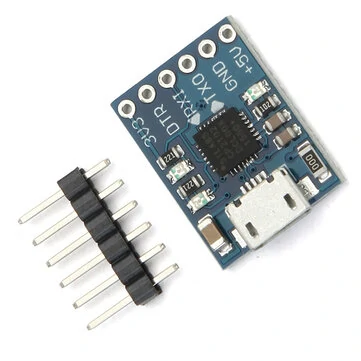
USB-シリアルアダプター。私は下記の物を使用しました。
コネクターとUSB-シリアルアダプターの接続
Jumper T16 の内部モジュールのコネクターとパソコンに接続したUSBケーブルを接続するために必要な物です。
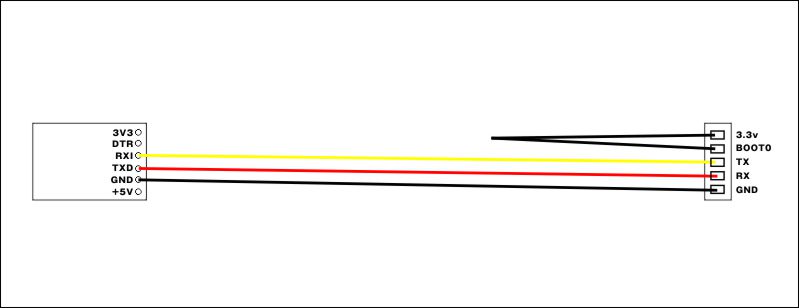
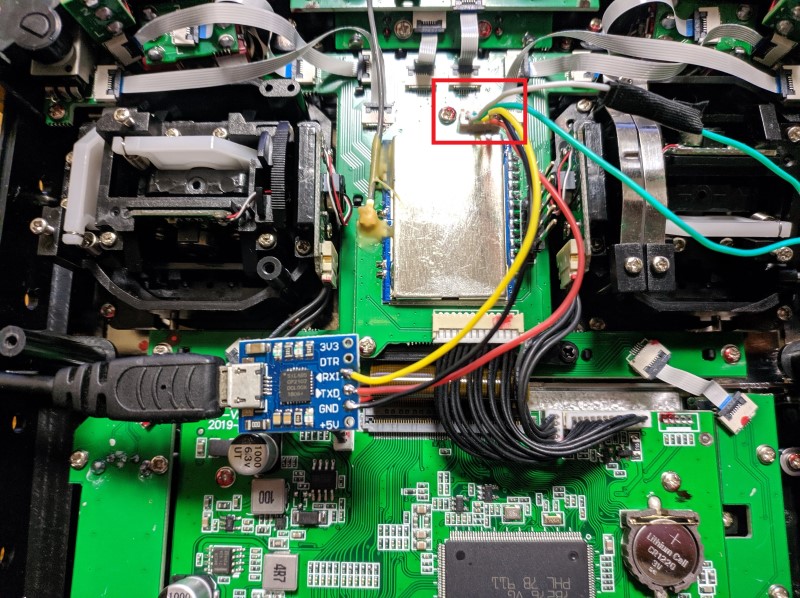
下の写真が完成した物です。左側がUSB-シリアルアダプターです。シリアルアダプターにはGND、TXとRXの3本を接続します。内部モジュール側の上2本は短絡させます。これは内部モジュールをブートモードにするためです。また内部モジュールは3.3V以上の電圧がかかると壊れてしまうので、無線機側の信頼できる3.3Vを使用するためでもあります。
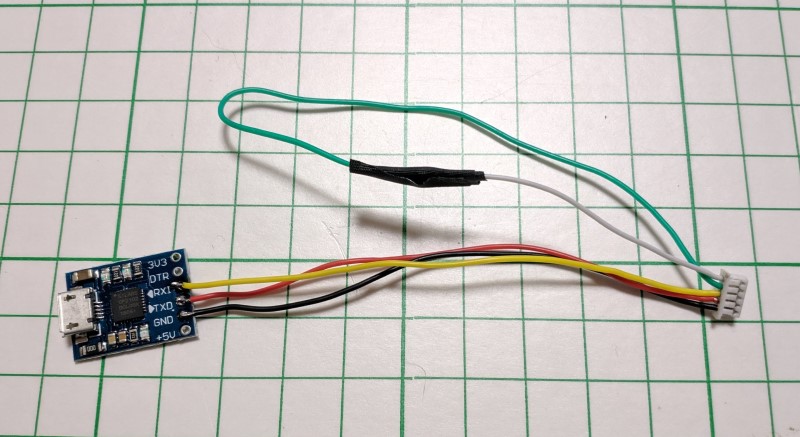
内部モジュール側のコネクターは上から、3.3V、BOOT0、TX、RX、GND となっています。
TXとRX、RXとTX を接続します。GNDはGNDですね。(下記の図でケーブルの色は適当です。)
ファームウェアのダウンロード
以下のダウンロードページを開きます。
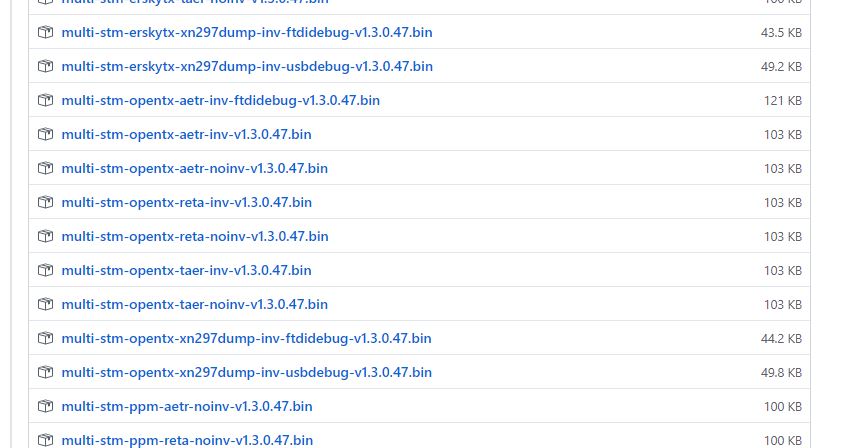
チャンネルマップに合わせて3種類、またそれぞれに、反転した信号(inv)と、反転していない信号(noinv)用に2種類あります。Jumper T16 では反転していない noinv を使用します。したがってチャンネルに合わせて3種類ありますので、現在使用しているチャンネルマップに合わせた物を使用します。
1ch~4ch がAETR(エルロン、エレベーター、スロットル、ラダーの英字頭文字)、RETA、TAERのどれかって事ですね。
私はAETRで使用していますので、
multi-stm-opentx-aetr–noinv-v1.3.0.47.bin
をダウンロードしました。赤文字のところがチャンネルマップです。
更新ツール Flash Multi のインストール
マルチプロトコルファームウェアを更新するためのツール、Flash Multi をダウンロードします。
下記サイトを開きます。
下記のように Releases をクリックしてダウンロードページを開きます。
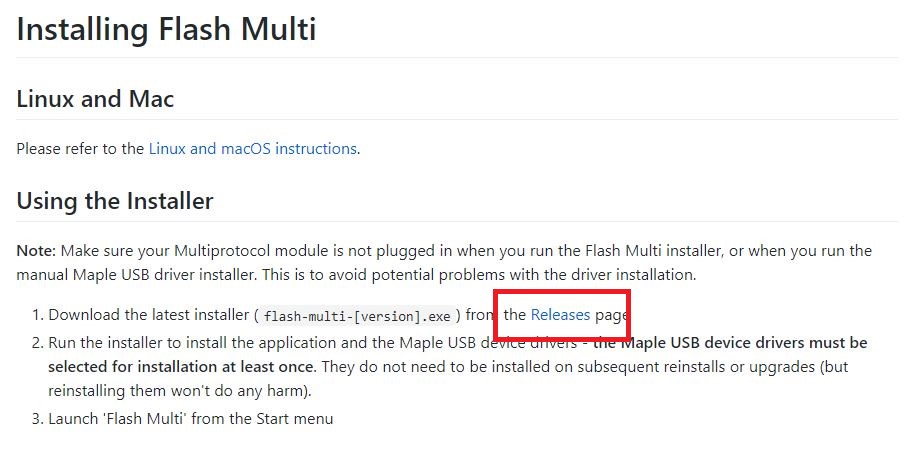
ここではインストール版をダウンロードします。Windows PC なら、
flash-multi-0.2.3.exe
を使用します。なお一部アンチウィルスソフトが反応して速攻で削除されることがありますので、その時は一時的に無効にしてから作業する必要があります。
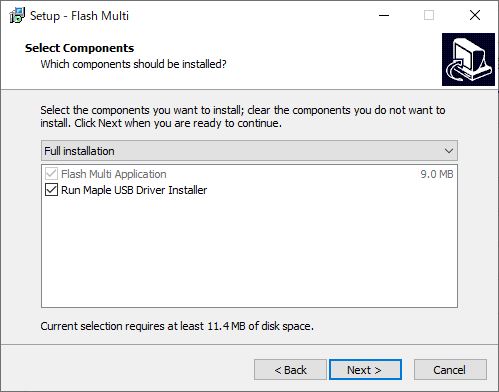
ダウンロード後ダブルクリックしてインストールウィザードに従いインストールしてください。この時必要なドライバも同時にインストールされます。
以上で準備が整いました。
ファームウェアの更新
必ず以下の順序で作業をしてください。
1、送信機のモデルメニューで、内部マルチプロトコルモジュールを使用している機体モデルを選択する。
2、送信機の電源を切り、バッテリーを外す。
3、内部マルチプロトコルモジュールにアクセスするために送信機の裏ブタを外します。この時外部モジュールも外しておく。
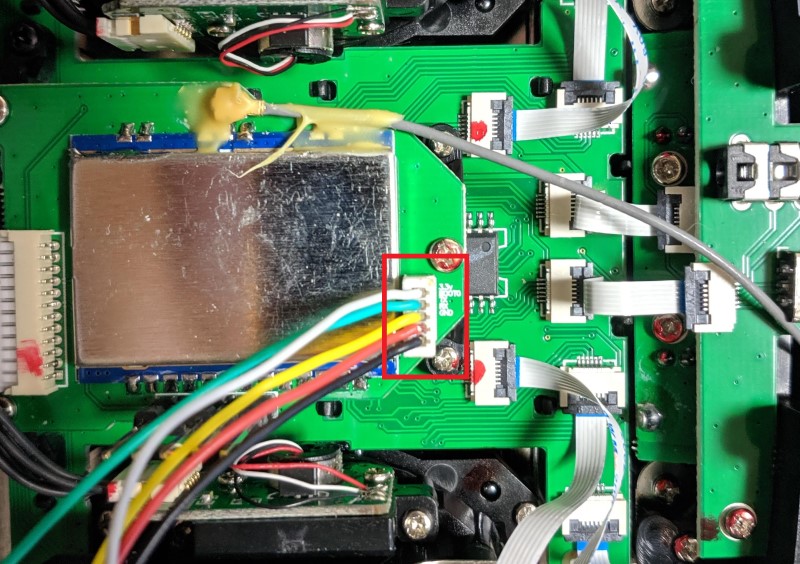
4、作成したUSB-シリアルアダプターとケーブルのコネクターを内部マルチプロトコルモジュールのコネクターに接続する。
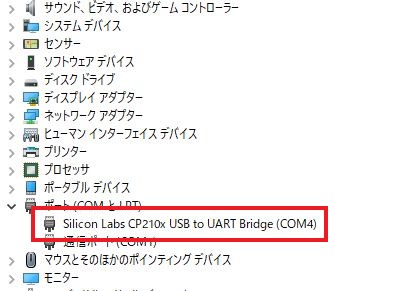
5、パソコンとUSBケーブルで、USB-シリアルアダプターに接続する。この時パソコンで正しく認識できない時はドライバを入れる。以下はデバイスマネージャーで見た、今回使用したUSB-シリアルアダプター用のドライバ。COM4に割り当てられた。
6、送信機にバッテリーを接続して、電源ON。スロットルワーニングやRC版の警告などを全部消す。消さないと内部マルチプロトコルモジュールが有効にならないため。
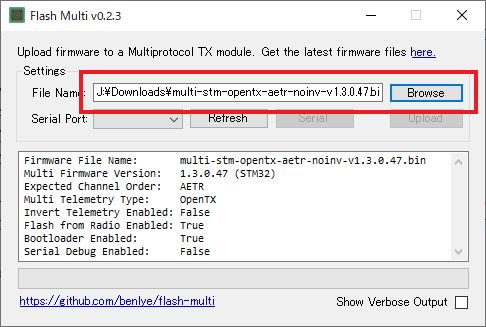
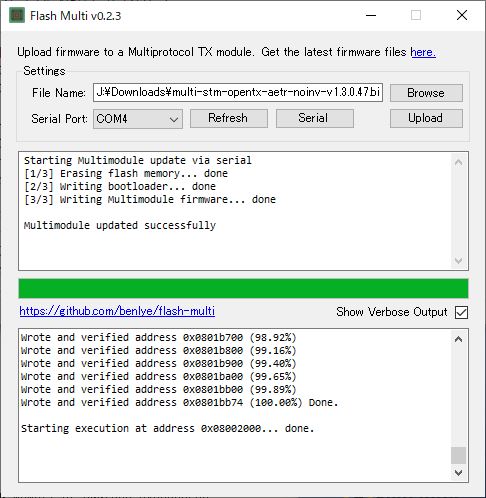
7、インストールした、更新ツール Flash Multi を起動し、ダウンロードしたファームウェアファイルを選択する。
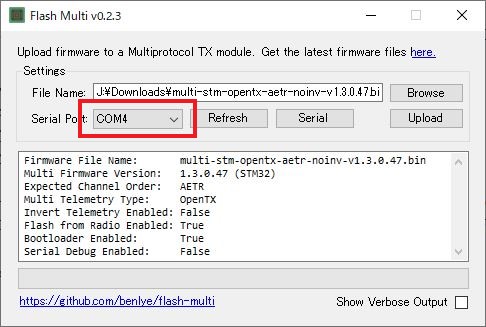
8、接続したポートを指定する。
9、[Upload] をクリックして更新する。下図のように、[multimodule updated successfully] と表示されれば更新完了です。
もし、途中で止まってしまったりエラーが出た場合は、配線、ドライバ、USBケーブル等を確認してください。
私の場合は、いつもBetaflightの設定をしているUSBケーブルで更新したら何度も途中で止まってしまいました。(これの解決に1時間以上かかった…)別の短いUSBケーブルに替えたところ無事書き込むことができました。
10、更新完了後一番初めに送信機の電源を切る。
11、内部マルチプロトコルモジュールに接続したコネクターを外す。
12、送信機の電源をONにしてマルチプロトコルモジュールのバージョンを確認する。
13、送信機の電源を切り、裏ブタを組み付けて元通りにして終了です。お疲れ様でした。
今回のファームウェア更新で、ブートローダーもインストールされましたので、次回からは簡単に更新できるようになります。
ブートローダー有りの時の更新作業
ダウンロードしたファームウェアを送信機のSDカード内の [FIRMWARE] フォルダにコピーします。
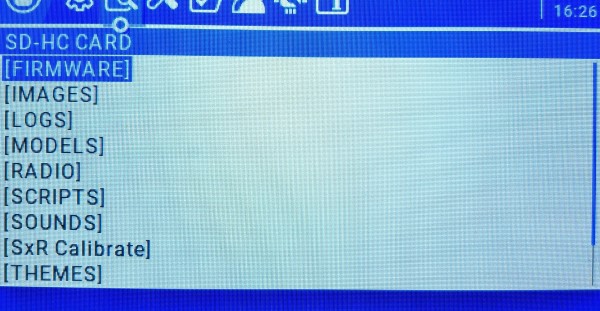
送信機の[SYS]ボタンを長押しします。[PAGE]ボタンでSD画面を表示します。(下図)
[FIRMWARE] を選択してEnter。
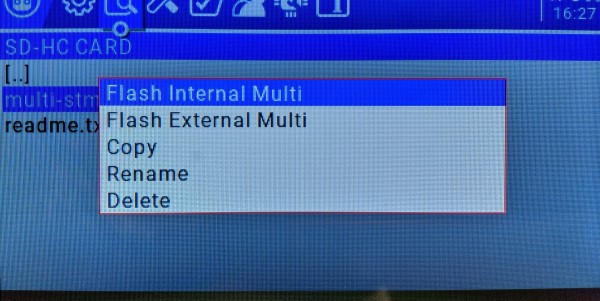
コピーしておいたファームウェアファイルを選択してEnterボタンを長押しします。
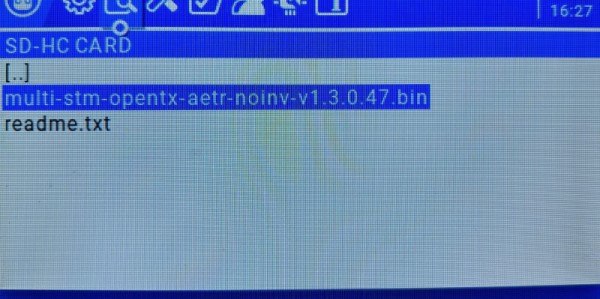
するとサブメニューが表示されますので、Flash Internal Multi を選択してEnterで書き込みます。
関連リンク
Jumper T16 Pro も技適付きです。

Jumper T16 Pro 仕様に改造するための内部マルチプロトコルモジュール
USB-シリアルアダプター
マルチプロトコルモジュールのファームウェア

