

前回のレビューその1では Diatone 2019 GT R349 のカッコイイ機体を見てきましたが、今回はフライトまでの準備をしていきます。別途用意したレシーバーと付属のブザーの取付、さらにFC設定の確認と更新を行っていきます。

レシーバーとブザーの取付
PNPバージョンですので別途レシーバーを用意する必要があります。
今回は FrSky XM+ を用意しました。
XM+ は RSSI が出力されるようにファームウェアを更新済みです。ファームウェアの更新方法は以下の記事を参考にしてください。
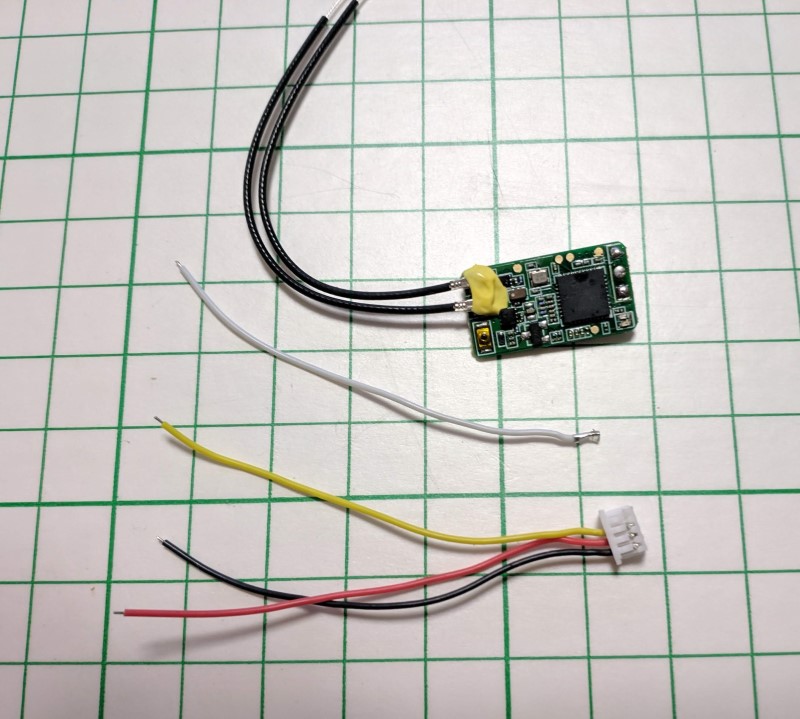
Diatone 2019 GT R349 にはレシーバー用のコネクタ付きのケーブルが付属していますので、そのうち汎用タイプのケーブルを使用します。FrSky R-XSR 用のケーブルも付属しています。
FrSky XM+ レシーバーはテレメトリ機能がありませんので使用する配線は 5V、G、SBUS の3本です。機体側に接続されているケーブルにはPPMパッドに接続されている配線もあります。しかし今回は必要無いのでレシーバー側で使用するコネクタから余分な1本を外しました。コネクターの止めている部分をカッターナイフの刃先で少し起こしてあげると抜けます。
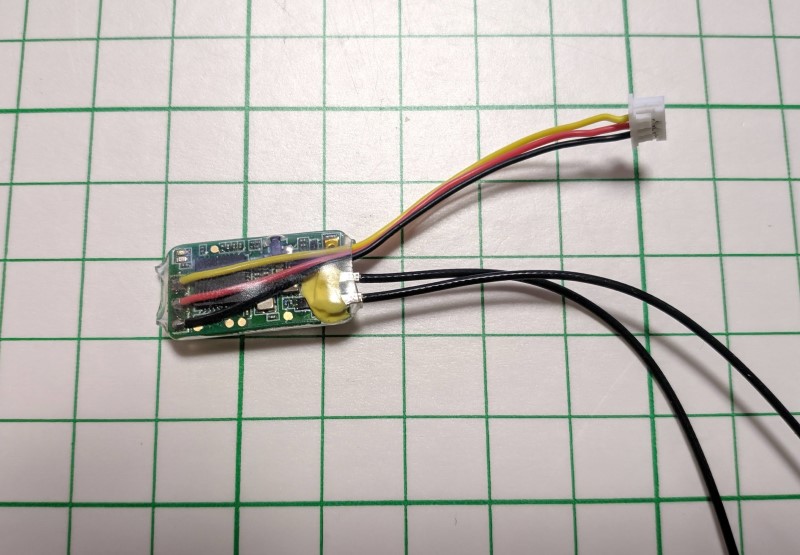
FrSky XM+レシーバー のパッドにコネクターケーブルをハンダ付けします。今回唯一のハンダ付け箇所です。他にはありません。またR-XSRレシーバーの場合はハンダ付けも必要ありません。コネクターをハメるだけです。
ハンダ付け後は熱収縮チューブで保護しました。
熱収縮チューブはコチラの幅14mmの物を使用。数百円で一生分ありますw

レシーバはアームの上にインシュロックで固定しました。またアンテナ線の処理も定番のインシュロックと熱収縮チューブを使用した方法です。

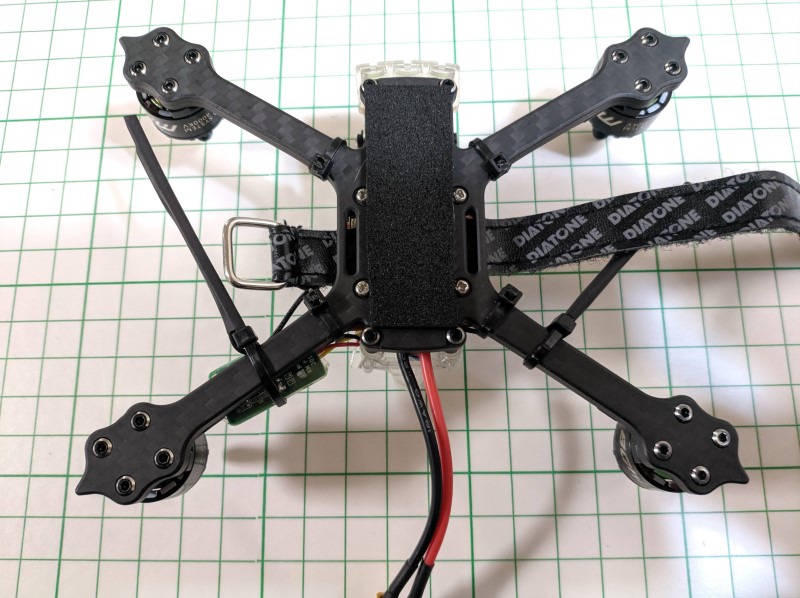
ブザーは付属の物を使用しています。ブザーのコネクタにFCから出ているコネクタをハメるだけです。裏面に両面テープが付いていますので写真のようにFCの上のカバーに貼り付けました。後に4K化する予定ですので、その時にブザーを移動するかもしれないので臨時の位置です。
ブザーだけ初めから設置されてなく、購入者に付けさせるのはちょうどいい場所が無かったので「好きに付けてね」って事なのでしょうか?

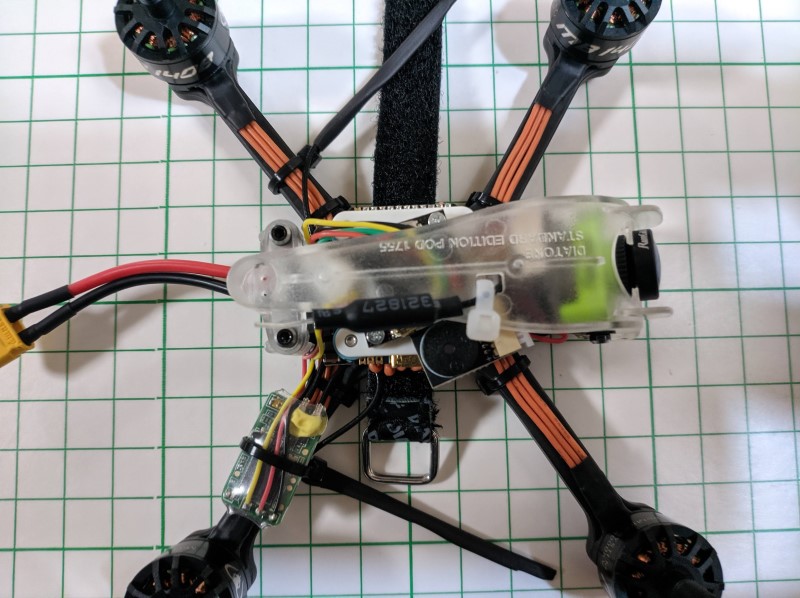
真上から見るとこんな感じです。3インチのプロペラからはそれなりに距離がありますので当たることはありません。あ、レシーバーのアンテナが90度になってないなw
ボトムプレートの裏面には付属のバッテリー滑り止めパッドではなく、手持ちのスポンジタイプを貼り付けました。付属のは貼るのがめんどくさそうだったのでw
またバッテリーストラップもESCの下を通すようにしました。
FC設定確認
ストック状態のFC設定を確認していきます。
Betaflight のバージョンは 3.5.1 が入ってます。ファームウェアターゲット名は、FURYF4OSD です。

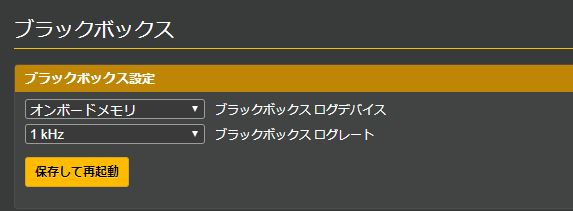
16MBのブラックボックスを搭載しています。

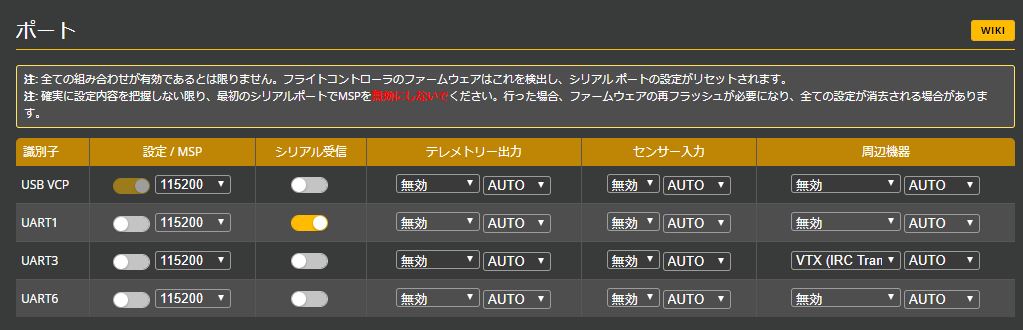
ハードウェアポートは3つあります。UART1がレシーバーで使用し、UART3がVTXのコントロール用として、IRC Tramp が設定してあります。UART6は空いています。
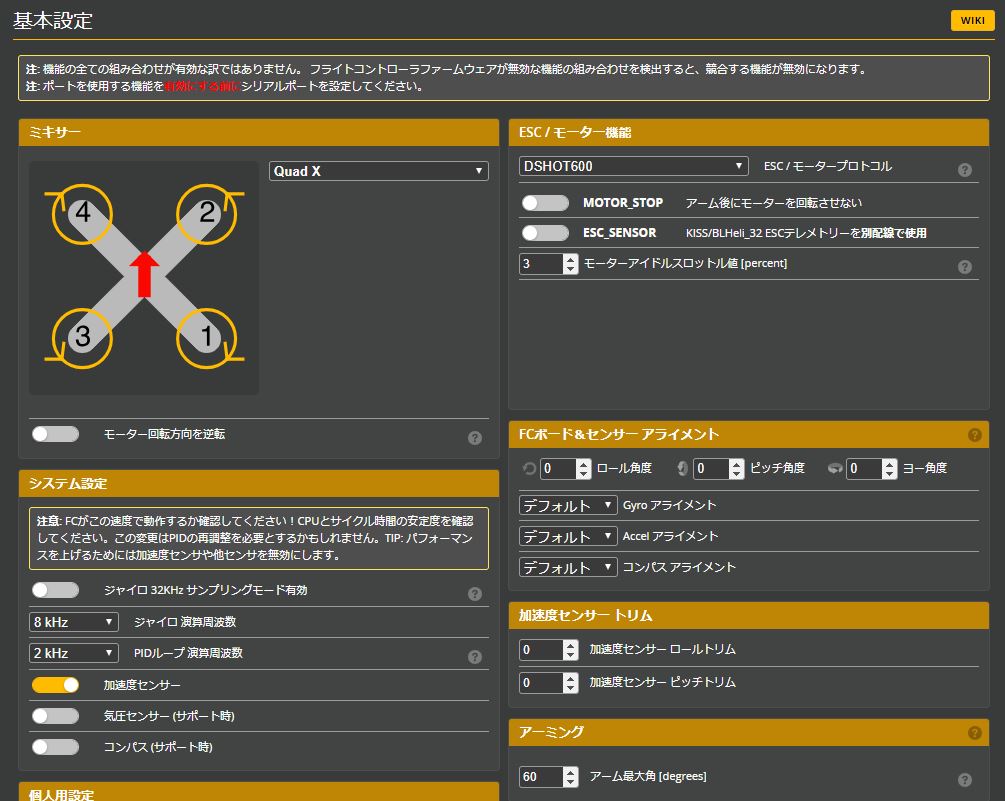
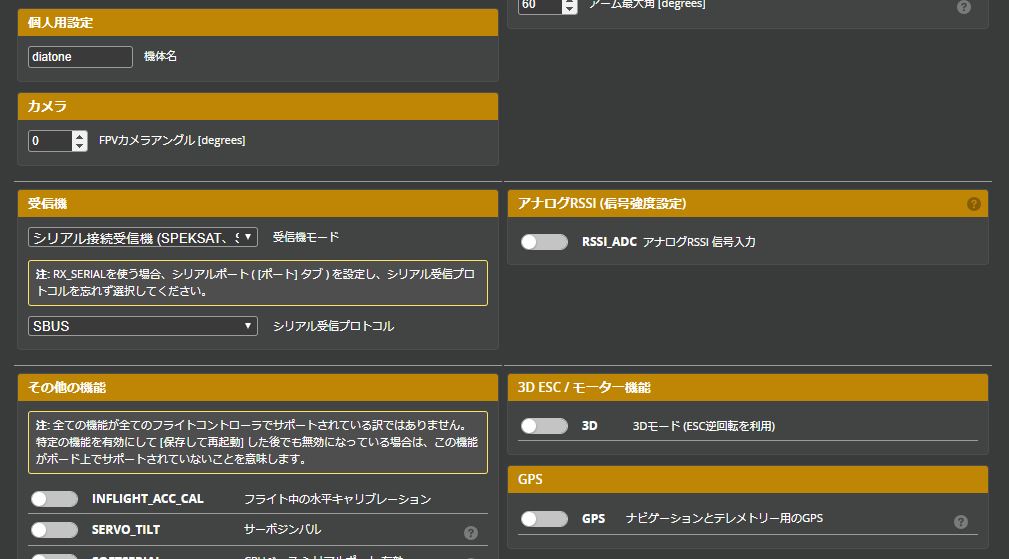
基本設定はこんな感じ。後程この時点での最新 Betaflight 4.1.1 に更新しますのでここではストック設定の確認だけしていきます。

電源・バッテリータブ

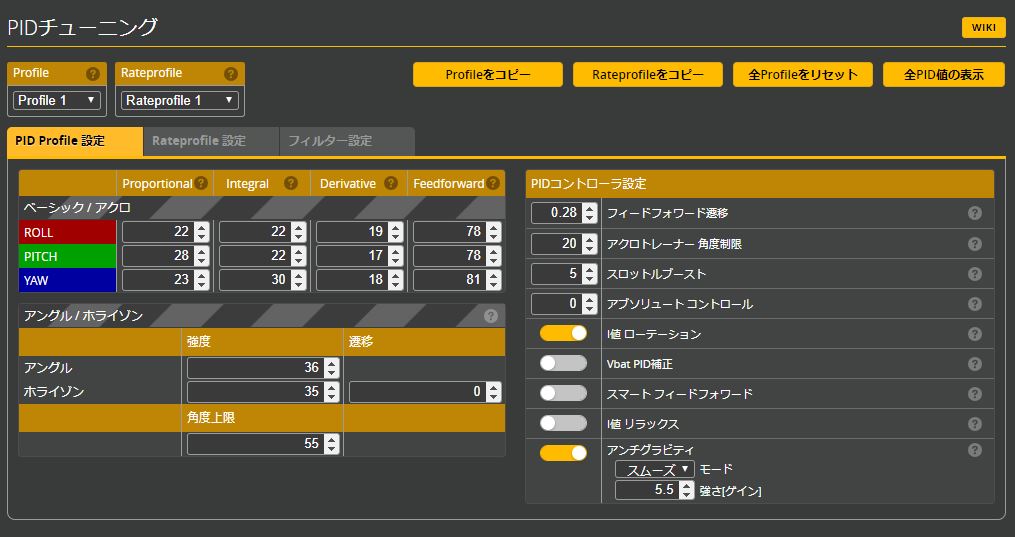
PIDタブ。全体にPIDが低く設定されていますね。
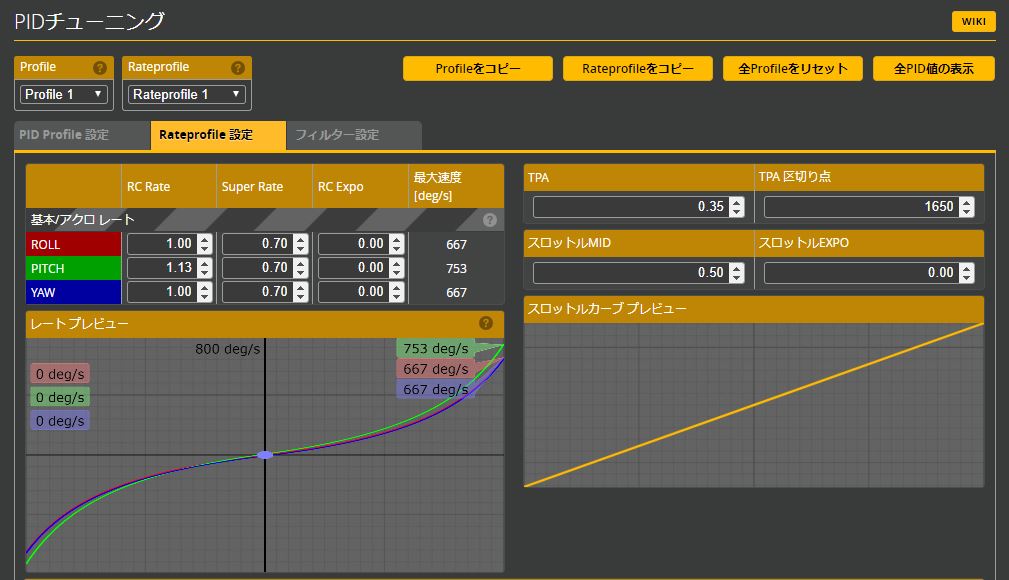
レートはピッチだけ少し変更されています。
モードタブでは2か所だけ設定してあります。


CLIで Diff all したものがこちらです。
Betaflight 4.1.1 へ更新
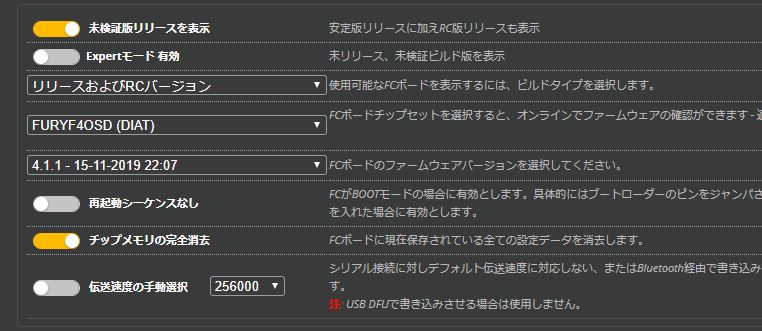
特に下位バージョンに固執する理由は無いので現時点で最新の Betaflight 4.1.1 に更新します。
FCのターゲット名は、FURYF4OSD です。(DIAT)とあるのはメーカーの略称になります。この場合はDiatone ですね。レガシーバージョンではなく統合ターゲットバージョンで更新します。
ポートの設定は更新前と同じでUART1にシリアルレシーバー、UART3にVTXコントロールを設定します。
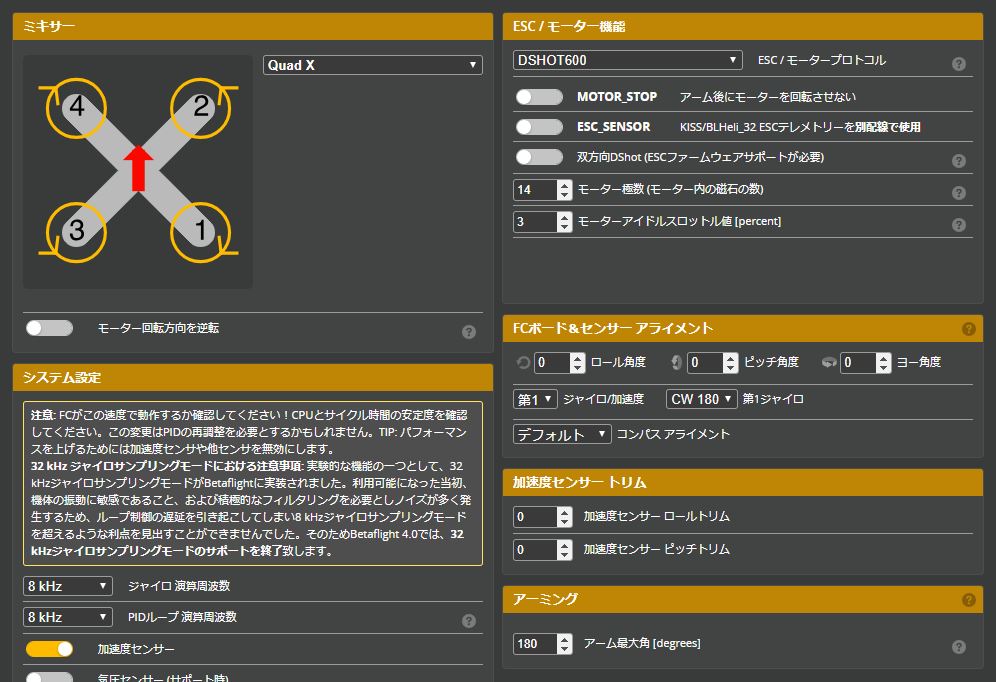
基本設定では、今回はRPMフィルターを設定しませんのでモータープロトコルをDSHOT600へ変更しました。
ジャイロとPIDループは8K/8Kに設定。アーミングは180度に設定します。
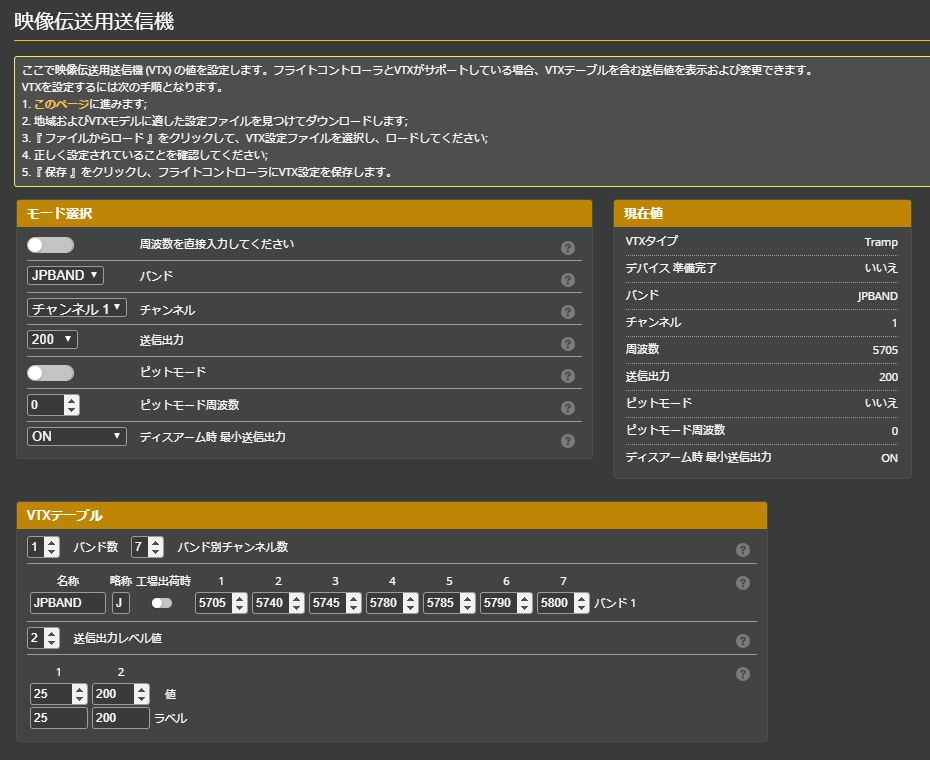
VTXテーブルは日本仕様にしました。BTFL_vtxtable_JBAND.json このファイルを保存して、「ファイルからロード」で読み込みます。送信出力部分をVTXに合わせて編集し「保存」します。
その後モード選択で下図のようにします。
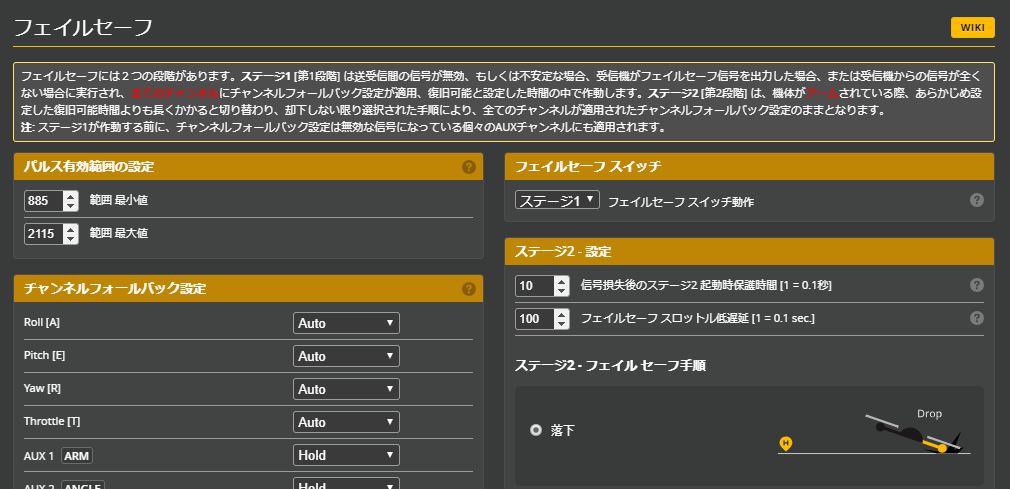
フェイルセーフタブで、「ステージ2・設定」の「信号喪失後のステージ2起動時保護時間」を10(1秒)にします。実はこれで助かったことが何度かあります。バインドが切れてもすぐ復帰すると落とさずに済みますw
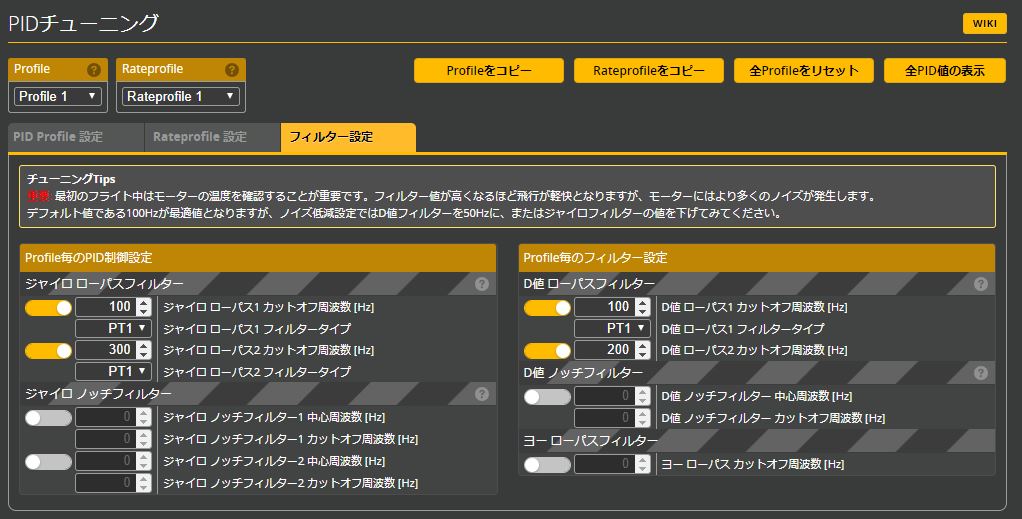
今回はPIDやフィルターは Betaflight 4.1.1 のデフォルト設定のままにしました。
さてあとはフライトですね。次の休日の天気はどうかな?

