

Betaflight 4.2 から利用可能になった、今話題のRCプロトコル Redpine(レッドパイン)は今までのどんなプロトコルより高速でRC信号を送信します。
送信機のスティックを動かしてから、FC が ESC へ DSHOTを送り出すまでのレイテンシー(遅延)はわずか 1ms~5ms という短さです。
この圧倒的な低レイテンシーは Betaflight側で実行されるRC信号のフィルタリングも早くなり、よりスムーズな飛行を実現します。もちろん遅れが少ないことは、スティック入力に対する機体の反応も早くなります。これはレース機ではぜひ使用してみたいプロトコルですね。レース機じゃなくシネマティックな撮影機でもRC入力がより滑らかになることで、余分な振動やブレが少ないフライトにつながることになります。
ここでは超高速プロトコルRedpineを導入してみます。
Redpine は何故早いのか?
Redpine とは
Redpine プロトコルはアメリカの brycedjohnson氏が開発しました。目的は出来るだけ低レイテンシーを実現させることでした。
1年以上の期間を経て、Betaflight 4.2 から実装され利用できるようになりました。
Redpine は今までのどのプロトコルより高速です。1.5ms(666Hz)のループ時間で実行され、送信するデータも切り詰めてスピードを上げています。(後述)

上のグラフはRC信号を200回送信した時のグラフで、縦軸は信号のカウント数、横軸はレイテンシーです。一番左の濃いオレンジのラインがRedpineで、すべての信号が5ms以内に届いています。
Redpineがスピードを上げるために削られた機能
Redpine はテレメトリーがありません。テレメトリーがあると、レシーバーはRC信号を受信してから、テレメトリーを送るために受信モードから送信モードに切り替えなくてはいけません。これは相当な遅れを生みますので最初から実装されていません。
Redpine は16チャンネルです。RC制御用に最初の4チャンネルだけは 11bitのデータを送信します。11bit の内 10bit を使用するので2048の解像度でピッチ、ロール、ヨー、スロットルの操作用にできます。残りの 12チャンネルは1bitしか使用しません。つまり AUX1 ~ 12 までは ONかOFF しかないことになります。3ポジションスイッチは2ポジションとしてしか使用できなくなります。
Redpine が使用できる要件
Redpine はレシーバーが CC2500チップを使用しているSPIレシーバーで使用できます。
具体的には、Crazybee系統、Matek411RXなどです。私がRedpineを使用できることを確かめた機種は以下の通りです。FCに内蔵されたSPIレシーバーを搭載した機体ですね。
- HappyModel Mobula6
- HappyModel Mobula6 HD
- Betafpv Beta65HD
- Eachine UZ65
- Eachine AE65
- EMAX TinyHwork II Freestyle
送信機側は、マルチプロトコルモジュールで使用できます。マルチプロトコルモジュールを使用していないTaranisなどはモジュールベイに外部マルチプロトコルモジュールを入れれば使用できます。
これらの機種はJumper T16 PRO のマルチプロトコルモジュールのファームウェアを最新の Multiprotocol v1.3.1.69 にし、Open-TX 2.3.10 を使用して確認しました。
Redpine を使用する
初めに送信機のファームウェア(Open-TX)や送信モジュールのファームウェアを最新に更新しましょう。
機体側の設定をする
Betaflight でRedpineプロトコルを使用できるように設定します。
機体とパソコンをUSBケーブルで接続し Betaflight Configuratorを起動します。
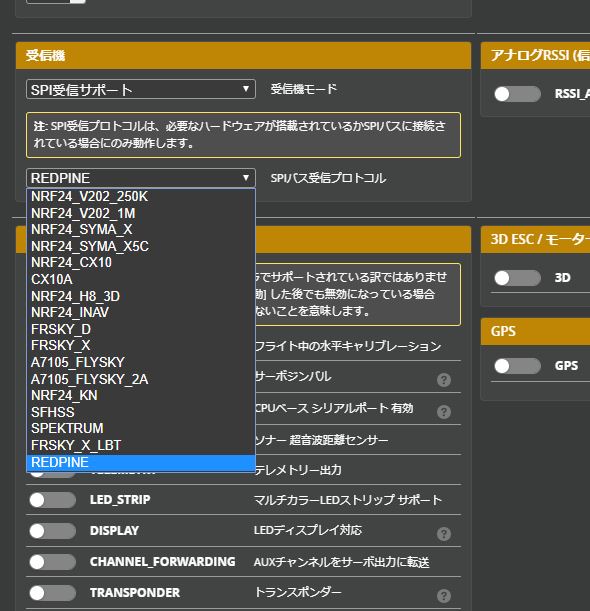
「基本設定」タブの「受信機」で受信機モードを「SPI受信サポート」に変更する。ここは初めからなっているはずですね。次に「SPIバス受信プロトコル」を一番下にある REDPINE に変更します。
「保存して再起動」します。
送信機側の設定
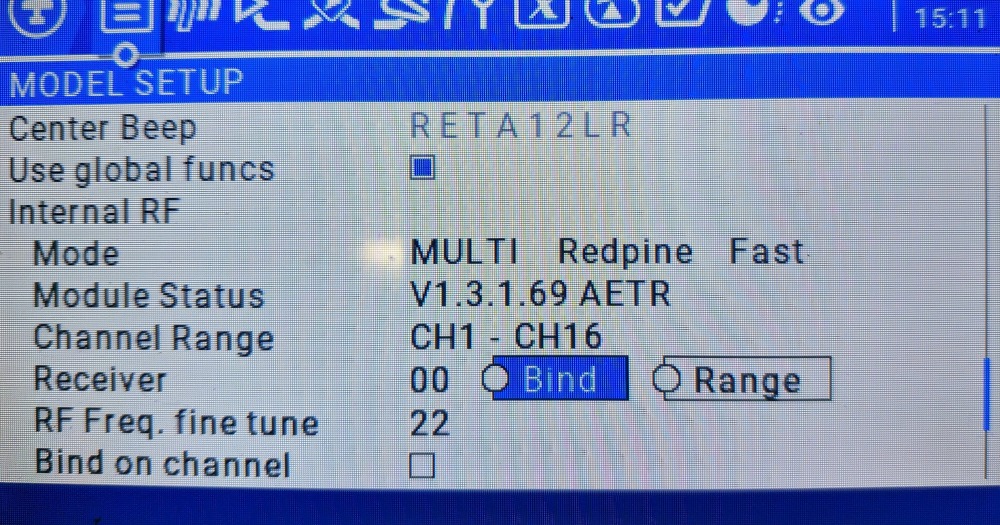
使用する機体のモデルページを開きます。下の画像は Jumper T16 PROで行っていますので送信機のモジュールは「Internal RF」になります。ここの「Mode」で下図のようにRedpineを選択します。その右の「Fast」はそのままにします。

これで準備ができましたので、あとはレシーバーとバインドします。
レシーバーとバインドする
パソコンからのUSB電源でレシーバーが起動しない機種はバッテリーを接続します。
機体をパソコンと接続したまま Betaflight Configurator のCLIタブを開きます。以下のコマンドを入力します。
bind_rxこれでレシーバーはバインドモードになりますので、送信機側もバインドモードにして数秒で完了です。レシーバーを再起動させるとバインドします。Betaflight Configurator の受信機タブで確認してみましょう。
OSDにはRSSI信号も表示されます。
送信機モジュールでREDPINEの右に表示されているFASTをSLOWに変更すると、パケット送出間隔がFASTの 1.5msから15msになります。誤り訂正符号をつけて送信するので、もしかしたらこちらの方が到達距離が伸びるかもしれません。
3ポジションスイッチの問題
Redpine はスピードを上げるために5~16チャンネルはON/OFFしかできません。つまりAUXスイッチが2ポジションでしか使用できないことになります。
これらのスイッチに3つのポジションそれぞれに機能を割り当てている場合は変更が必要になります。例えば、スイッチが上でアングルモード、中央でホライズンモード、下でアクロモードなどです。
幸いにして Redpine は16チャンネル全てが使用できるのでAUXスイッチを増やして対応します。私の場合は今まではAUXスイッチは3つでしたが、下記の通り5つになりました。
- AUX1 アーム - ディスアーム
- AUX2 アングル - アクロ
- AUX3 エアー - OFF
- AUX4 ブザー - OFF
- AUX5 フリップ - OFF
では3ポジションスイッチがどの位置になるとONになるのでしょうか?
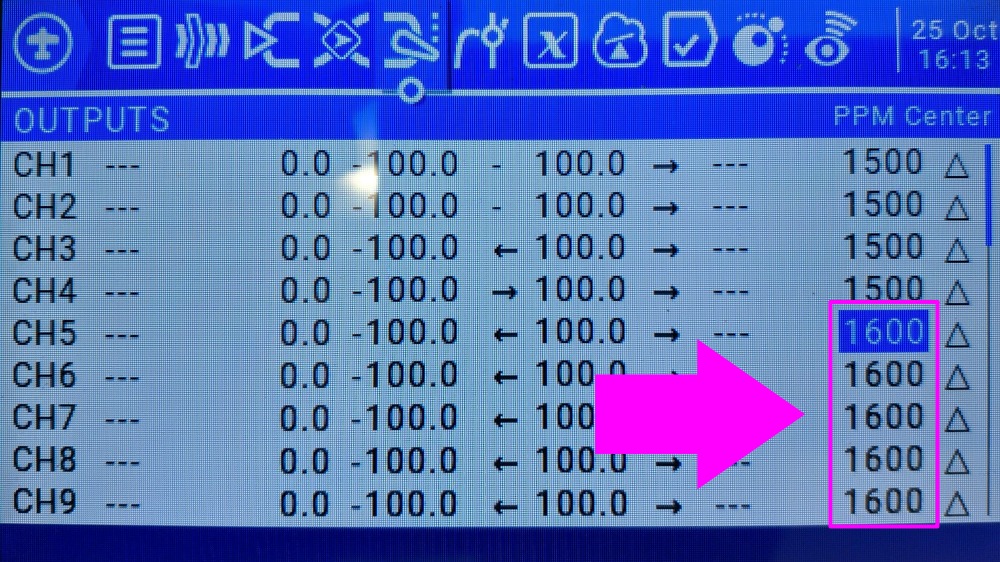
試したところ、上・中央 がPPM信号が 0 になり、下が2000になりました。
そこで送信機のOUTPUTでPPM信号の中央値を変更します。少しずつ変更していったら1551で変わりましたので、1600にしました。
Redpineプロトコルを使用するとどうなる?
Redpineプロトコルを使用すると、RC信号(パケット)のやり取りのレイテンシーが低くなりますので、スムーズなフライトに繋がります。通常はRC信号はすごくエラーが多くて、そのままFCに入力した信号の数値を使用することができません。そこでBetaflight にはRC信号をスムーズする処理がいくつも用意されています。とくに各パケット間隔が狭くなるのでそれだけでもスムーズになります。
もちろんレイテンシーが十分に低いので、機体の応答性が高まります。
では信号の到達距離はどうでしょうか?
Redpineではビットレートが上がっているので理論上すこし到達距離は短くなります。
しかし、実際にRedpine機を飛ばしてみると到達距離が伸びているように感じます。これはRC信号のロスが少ないためではないかと思います。
逆にいうと今まで使用していた FrSky プロトコルの方が悪すぎたように思えます。Betaflight 4.0.6 以降でSPIレシーバーの性能が悪くなったことが分かっていますが、Betaflight 4.2.2 で修正されたらしいのですが・・・
今のところRedpineプロトコルに変更するデメリットは3ポジションスイッチの問題だけの様です。これさえ解決すれば使用できる機体は全部Redpineプロトコルでいいと思います。

