

機体とバッテリーの合計重量が200g未満のドローン(U199)は、無人航空機ではなく模型航空機として扱われます。そのため特別な飛行許可・承認を取得しなくていいので、わりと手軽に飛行させることができます。今回はU199でありながら、パワフルで、フリースタイル飛行で高画質動画が撮影できるレーシングドローンを自作していきます。あなたも一緒に作りませんか? パート4



事前準備
ドローンの制作に入る前に必要な情報を確認します。FCに各部品を接続するためにはどこに何を接続するか把握しておかないといけませんよね。使用するFCの接続図(Connection Diagram)はありますか?製品に付属している物やメーカーのホームページからダウンロードしなければならないものもあります。中には全くそれらしきものが提供されていないものもあります。基本的にFC表面のハンダパッドには記号が印刷されていますので、それを見ることによって接続することができますが・・。またその他の部品のマニュアルも確認しましょう。
今回使用した GEPRC の STABLE PRO F7 DUAL BL32 35A はメーカーの製品ページにリンクがありました。
GEPRC-STABLE-PRO-F7-DUAL-MANUAL-V1_0.pdf
FCスタックですので各ボードはそれぞれコネクターで接続されていますので、残りはレシーバー、カメラ、LED、ブザーの接続位置を確認しました。
接続先が決定したら次は仮組を行います。各パーツが干渉しないか?接続コードの長さは足りているか?おのずと位置が決まってしまう部品以外はどこに搭載するか?などをチェックします。
私の場合は、FCのカメラコネクタとCaddx Tariser のコネクタが非常に近く搭載困難だったので、Tariser のボードをかさ上げしてコネクタ同士が干渉しないようにしました。ESCへのモーター配線は長さOK。LEDがFC側のコネクタのすぐ近くなのでOK。レシーバーは今回 F.PROT を使用するのであえてコネクターは使用せずFCのハンダパットに接続し、かさ上げしたTariserのボードの下に配置しました。
また、電源コードは実際にバッテリーを搭載して長さを確認しました。
制作開始
通常はここでフレームの面取り作業をします。が、今回の GEPRC Cygnet CX3 フレームキットはあらかじめカーボンファイバー製のボトムプレートとトッププレートは全周が面取りしてありました。
フレームの面取りはカーボンファイバーの層剥離を少しでも防ぐために行います。面取りはダイヤモンドヤスリで行いますが、削れたカーボンの粉は吸い込むと体に良くないので、フレームごと洗面器の水の中で研ぎ落します。ダイヤモンドヤスリはホームセンターで入手可能です。

電源コードの接続
ESCボードに電源コードをハンダ付けします。この時コンデンサーを一緒にハンダ付けします。このESCボードからFCに電源が供給されることになります。
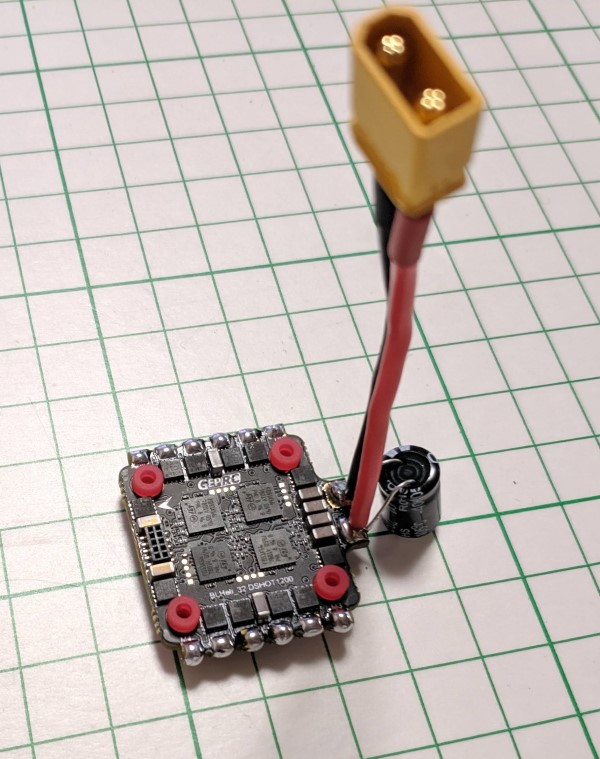
言うまでもなく極性を間違えないようにします。コンデンサーは側面にマイナスの表示があります。今回はハンダ付けのノウハウ等は無いです。私自身が下手なので・・・Youtubeで検索するとハンダ付け動画いっぱいあります。参考にしてください。
コードの被覆を剥ぐのにはニッパーやワイヤストリッパーなどの工具がありますが、シリコンコードの場合は爪でつまんで引っ張るだけで簡単にはがせます。私はシリコンコードで爪以外でやったことがありません。お試しください。
モーターコードの接続
電源コードをハンダ付け終えたら次にESCボードに各モーターのコードをハンダ付けします。今回のフレームではFCスタックが機体の後方に搭載されるので前方側のモーターコードはフレームサイドに沿うようにしています。なお、ハンダ付け時にESCとモーターは正規の位置に固定してから行わないと長さが分からなくなるので注意します。またモーターのコードは3本ありますがどれがどこに接続されても問題ありません。この接続位置でモーターの回転方向が決まるのですが、完成後に設定ソフトで回転方向を変更できるからです。
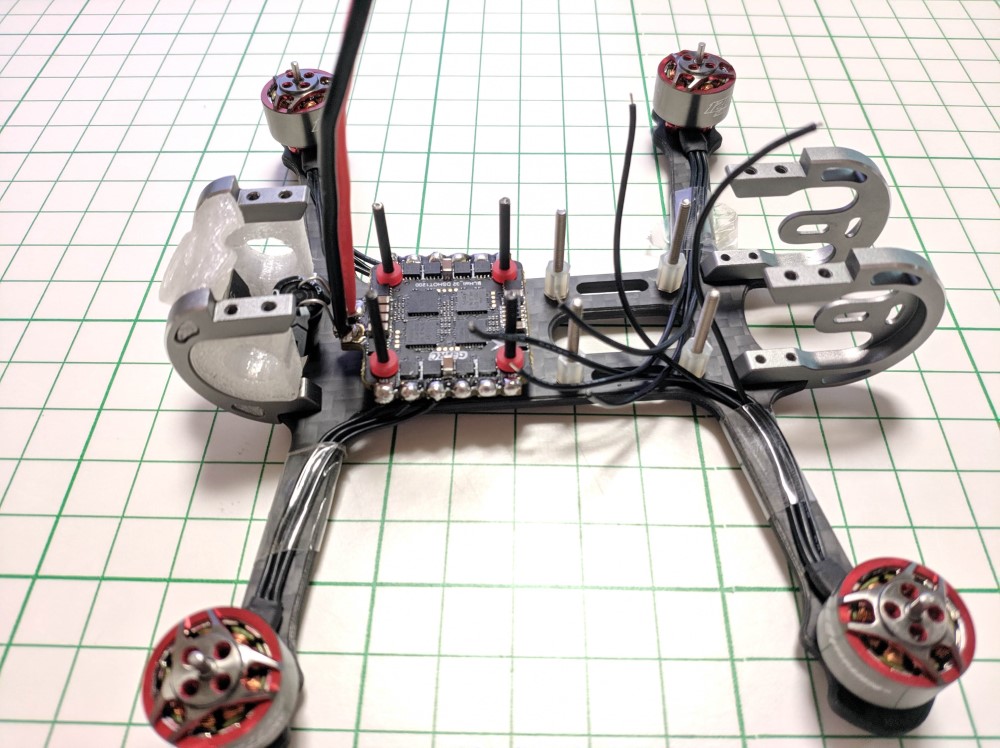
上の写真ではセロハンテープでモーターコードをフレームに仮止めし、左手前の3か所をハンダ付けした所です。(右側が機首方向)
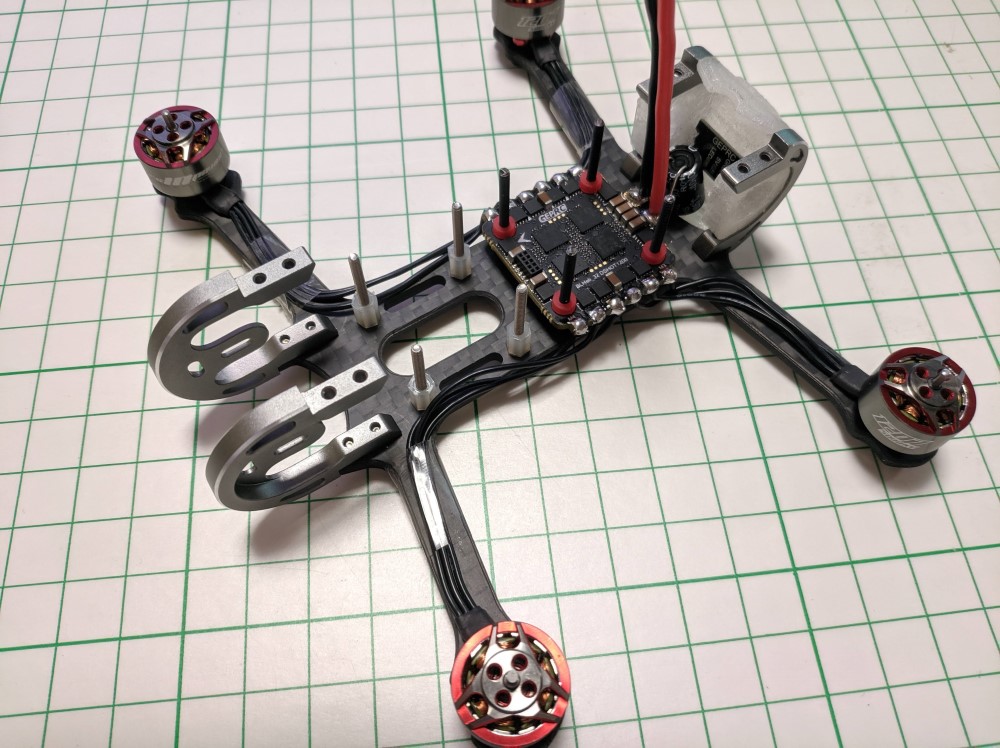
4つのモーター全てをハンダ付けしました。(左側が機首方向)
ハンダ付けが間違いなくできているか確認します。隣と接触していませんか?取れそうではありませんか?もう一度確認してください。バッテリーを繋いで一発でおしゃかは悪夢ですよ・・・
レシーバーの接続
今回はFrskyの F.PORT で接続するのであらかじめ R-XSRレシーバーのファームウェアを F.PORT 用に書き換えておきます。書き換え方法は以下の記事で解説しています。

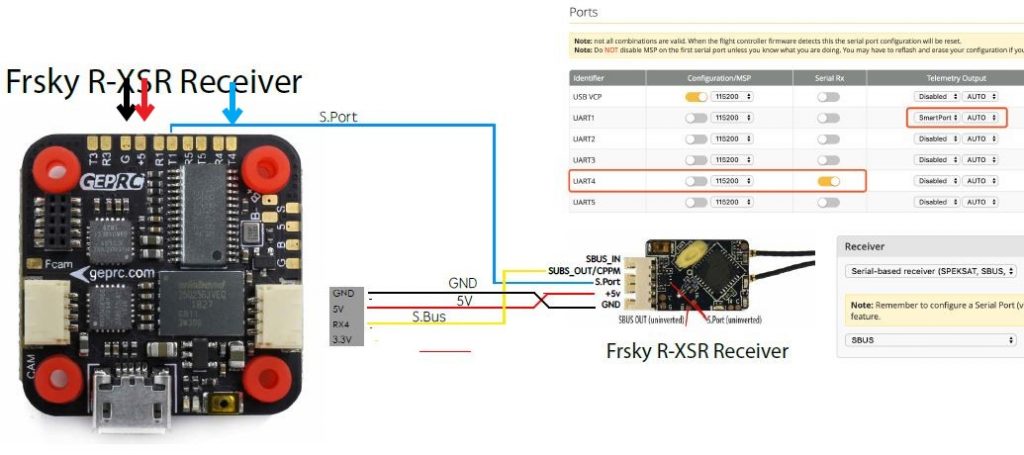
F.PORTの場合テレメトリを取得する場合でも3本のコードだけで出来ます。下図は今回使用するFCの接続図からR-XSRの部分を切り出したものです。F.PORT ではなくS.BUS接続の時は、5V、GND、S.BUS、S.Port の4本のコードで接続しますが、今回は図中の下向き矢印の黒色にGND、赤色に5V、青色にF.Port を接続します。F.Port はRXパッドではなくTXパッドに接続します。なおレシーバー側のF.PORTは図中のS.Portと表記してあるところになります。直接FCに接続したのでFC側のレシーバコネクタは使用しないことになります。
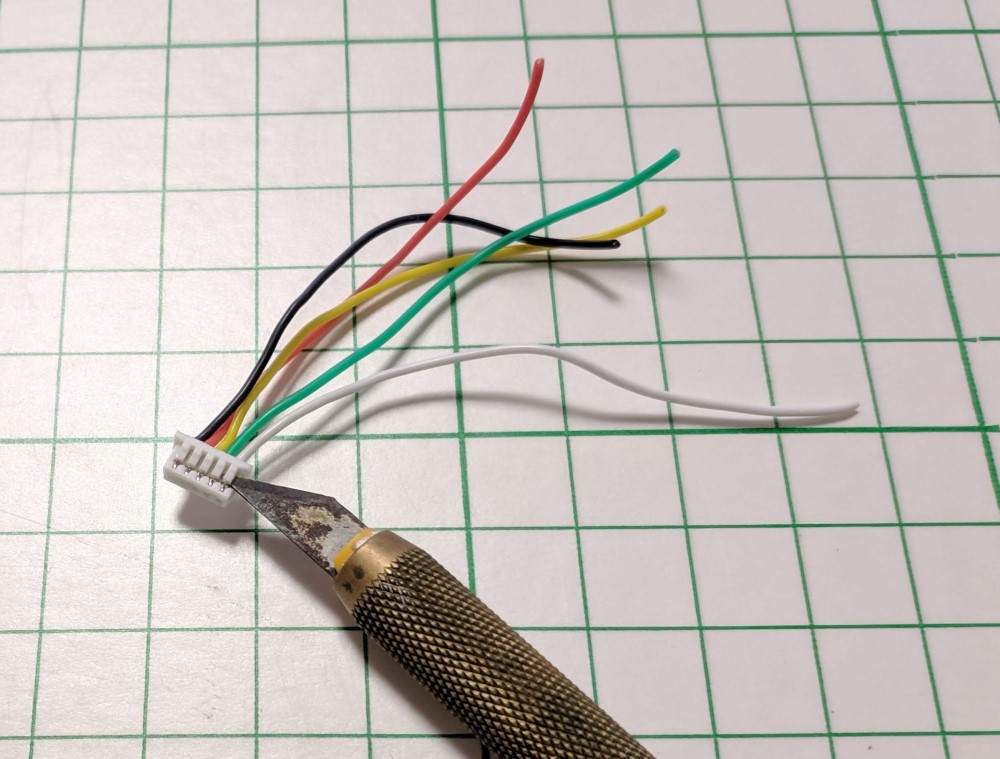
コネクタの余分なコードは外しておきました。カッターなどの先の細いもので、写真のように内部の圧着端子を抑えている樹脂の爪を少し起こしてあげると抜くことができます。(そっとやってね。)もちろん同じようにしてコードの色の配置換えも出来ます。
レシーバーは Caddx Tariser のボードの下に配置するので、FCから配置する位置までコードの長さが足りなくなる事のないように注意しておきます。
ハンダ付けが終了したらもう一度問題ないか確認しましょう。FC上のハンダパッドは小さいので隣とくっついてしまいがちです。よーく見てください。マルチメーターがある場合は導通モードにしてテストしてみましょう。
ここまで出来たらESCとFCを接続させます。この段階でレシーバーは送信機とバインドさせておきましょう。組み込んでからバインドしようとするとレシーバーのバインドボタンが押しにくかったりします。

